Шаговые двигатели (подробный разбор 4 типов)
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.

- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90° ).
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.

На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
- Биполярный двигатель имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
- Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
- 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
-
Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим — ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим — ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим — ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.

Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.

Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.

Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.

Если подавать уровни не «0» — «½» — «1» (как на картинке), а «0» — «¼» — «½» — «¾» — «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления — доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.

Пример работы шаговых двигателей с разными видами роторов:

Подключение шаговых двигателей к Arduino:
Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
Большинство драйверов работают либо с биполярными двигателями, либо с униполярными.
- Биполярный двигатель можно подключить только к драйверу биполярных двигателей.
- 6-выводной двигатель можно подключить к любому драйверу. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток внутри двигателя, последовательно или параллельно.
- Униполярный двигатель, при необходимости, можно подключить и к драйверу биполярного двигателя по простой схеме из нескольких диодов (лучше использовать диоды Шоттки), но такое подключение гарантирует корректность работы униполярного двигателя только в полношаговом режиме.
Драйверы делятся на две категории:
- Повторяющие форму сигналов. Этот тип драйверов не формирует импульсы, а лишь повторяет их форму для управления двигателем. Формирование импульсов отводится микроконтроллерам (например Arduino). К этой категории относятся такие драйверы как MotorShield на базе чипа L298.
- Формирующие сигналы управления. Используя данный тип драйверов, можно обойтись без микроконтроллеров, так как для их работы достаточно подать меандр и выбрать режимы работы. К этой категории относятся такие драйверы как например A4988.
Как подключить шаговый двигатель с 5 выводами
Віримо в перемогу ЗСУ!
Працюємо з 09:00 до 18:00 Пн-Сб Працюємо з 09:00 до 19:00 Пн-Пт —> Магазин у відпустці до 19.08.2023 —>
- Ваша корзина пуста!
- Главная
- Статьи
- Подключение шагового двигателя
Привет, друзья! Предлагаю вам практический алгоритм, как правильно подключить обмотки шагового двигателя к драйверу. Начинающие, и не только, ардуинщики при работе с шаговыми двигателями часто сталкиваются с проблемой определения, где выводы первой обмотки, где второй, где начало первой обмотки, где второй. Так же часто возникает вопрос как проводами поменять направление вращения двигателя. Давайте в этом видео разберёмся, как с высокой степенью четкости подходить к решению этих вопросов.
Давайте подпишемся на канал, лайкнем это видео и поехали дальше.
В идеальном случае нам может попасться широко известный тип шагового двигателя, у которого имеется стандартный неизменный клеммник, схему подключения которого легко найти в гугл-картинках. Так же желательно, чтобы была и легко находимая схема подключения имеющегося драйвера. Тогда их чаще всего получается подключить с первого раза без ошибок. Хотя я умудрялся и в таких случаях напутать. Но мы будем исходить из того, что двигатель у нас с неизвестной цветовой маркировкой проводов, что часто становится проблемой и схемы подключения обмоток двигателя к имеющемуся драйверу нет.
Кстати насчет схем подключения драйверов, тут тоже есть свои факторы запутывания и непоняток. Вот к примеру обозначения выходов трёх самых популярных драйверов. Кружочками будем обозначать условное начало обмотки двигателя. Все обозначения здесь сильно отличаются у каждого драйвера. Эти отличия начинаются с самих инструкций на микросхемы драйверов. Прямо в pdf на каждую из этих популярных микросхем создатели заложили столько путанины – как тут разобраться без бокала пива!?

По возможности нужно тестировать подключение на ненагруженном шаговом двигателе. Для управления возьмем контроллер Arduino NANO. Будем использовать его просто как задающий генератор. Вы можете взять любой драйвер шагового двигателя. Только разберитесь по документации или по подписям на плате, где находятся пары выходов под каждую обмотку. Я возьму самый популярный драйвер A4988. Вот схема включения для нашего универсального алгоритма подключения обмоток двигателя. От контроллера подается прямоугольный сигнал известной частоты на вход STEP драйвера, который отвечает за запуск шагов. При этом вход DIR, отвечающий за направление вращения ротора, подключен к общему проводу – он нам не понадобится. Так же у конкретного драйвера необходимо подать питание логики (для некоторых драйверов это не нужно). А так же необходимо подать разрешающие вращение сигналы, такие как RESET, SLEEP, ENABLE. Для драйвера A4988 можно просто поставить перемычку между RESET и SLEEP – это переведёт драйвер в рабочий режим. Так же подключаем провода питания двигателя к источнику 12В. А сами катушки двигателя стараемся по имеющимся схемам и документациям подключить хотя бы к своим парам выходов драйвера. Но, если не получается разобраться сразу, не отчаивайтесь – мы здесь разберём все случаи.

Теперь по быстрому обратим внимание на программу, которая будет загружена в Arduino NANO. Я беру стандартный пример Blink, который мигает светодиодом раз в две секунды и назначаю свой выход номер 2, к которому подключен вход STEP. А так же ставлю задержку в 1 миллисекунду. Это означает, что на вход STEP драйвера пойдет прямоугольный сигнал с периодом в 2 миллисекунды или 500 Гц, что для 200-шагового двигателя соответствует 2,5 об./сек или 150 об./мин. Эта скорость и не большая и не маленькая и как по мне хорошо подходит для экспериментов по подключению обмоток двигателя. Кстати вместо контроллера Arduino, вы можете то же самое проделать и при помощи генератора прямоугольных импульсов. Выставьте на нем частоту приблизительно равную 500 Гц. Амплитуда напряжения на выходе должна быть 5В. Соединяете общий провод и выход генератора подключаете ко входу STEP драйвера.
void setup() < pinMode(2, OUTPUT); >void loop() < digitalWrite(2, HIGH); delay(1); digitalWrite(2, LOW); delay(1); >

Итак после подключения у вас получится одна из четырех ситуаций: в первой вы правильно угадаете начала обеих катушек; во втором случае одна из катушек будет подключена началом в обратную сторону; в третьем случае вы угадаете начала катушек но перепутаете пары выходов драйвера; и в четвертом случае будет перепутано все максимально. Теперь попробуем все эти случаи на практике.
В первом идеальном случае ротор двигателя вращается с ожидаемой скоростью в ожидаемом нами направлении.
Во втором случае наблюдаем обычную скорость вращения и нормальный режим работы двигателя. Только вращение направлено в другую сторону. В большинстве случаев вам подойдет и так.
В третьем случае у нас перепутаны пары выходов драйвера и они не совпадают с выводами своей катушки. Вращение непредсказуемое, а точнее дергание ротора вперёд и обратно.
В четвертом случае все повторяется с третьего опыта. Часто такое подключение запутывает своей работой наполовину и кажется, что все как бы подключено правильно, только направление одной обмотки нужно поменять и все. На самом деле оно так и есть, но менять надо подключение не одной обмотки, а двух проводов с разных обмоток.
И, чтобы быстро поменять направление вращения ротора при помощи проводов, я переворачиваю зеркально все 4 провода от двигателя.

Еще раз более внимательно разберём в графическом виде, что нужно переворачивать. Здесь буквами А и В обозначены пары выходов драйвера. В первом случае нас все устраивает. Во втором случае нам не понравится направление вращения ротора по умолчанию. Для поворота в правильную сторону вам нужно поменять провода на одной из пар выходов драйвера. В третьем случае двигатель дергается на месте, что означает, что нужно поменять местами два провода из разных пар выходов драйвера. В четвертом случае все так же как и в третьем, только направление вращения ротора после замены местами двух проводов нам может не понравиться и тогда мы оказываемся на втором случае и уже знаем как развернуть ротор в другую сторону. В общем, как бы мы не подключили шаговый биполярный двигатель к исправному драйверу, получаем два варианта событий: либо ротор вращается в рабочем режиме, либо дергается на месте. И, чтобы он перестал дергаться и вращался нормально, вам нужно перекинуть два провода. Это и есть алгоритм подключения шагового двигателя.
Спасибо за внимание! Нам очень поможет ваша подписка и лайк!
Схемы управления шаговыми двигателями
Современные шаговые двигатели, гибридые либо ШД на постоянных магнитах, как правило, производятся с двумя обмотками (4 вывода), с двумя обмоткми и центральными отводами (6 либо 5 выводов) и с четырьмя обмотками (8-ми выводные ШД). Биполярные двигатели имеют две обмотки и, соответственно, четыре вывода. Униполярные двигатели также имеют две по обмотки, но у каждой из них есть центральный отвод, что позволяет использовать для управления двигателем простой униполярный драйвер (т. е. переключать направление магнитного поля, создаваемого обмотками двигателя переполюсовкой половин обмоток двигателя). Иногда средние отводы могут быть объединены внутри двигателя, такой двигатель может иметь 6 или 5 выводов. В силу простоты униполярной схемы управления эти двигатели находят широкое применение в самых различнх областях промышленности.
Однако большинство драйверов предназначено для управления биполярными двигателями. При тех же габаритах биполярный шаговый двигатель обеспечивает больший момент по сравнению с униполярным. Поэтому наибольший практический интерес у новичков вызывает именно схема управления биполярным шаговым двигателем.
Постараемся разабраться, каким образом можно подключить 6-ти или 8-ми выводной мотор к биполярной схеме управления и как при этом изменяются электрические характеристики двигателя?
6-ти выводные шаговые двигатели
Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов — униполярное либо биполярное подключение обмоток двигателя.
Униполярное подключение
Если требуется вращать двигатель на средних и высоких скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать центральный отвод.
Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге.
Биполярное подключение
Если требуется вращать двигатель на низких скоростях (из диапазона рабочих скоростей), лучший тип подключения — биполярное.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр. 2 * R
При последовательном включении обмоток потребляемая мощность становится Iбиполяр. 2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр. 2 * R = Iбиполяр. 2 * 2* R, откуда
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Итак, характеристики ШД будут такими:
| Параметр | Значение |
|---|---|
| Iбиполяр.= 0.707 * Iуниполяр. | |
| Сопротивление обмотки, Ом | Rбиполяр. = 2 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр. = Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
8-ми выводные шаговые двигатели
Для подключения 8-ми выводного шагового двигателя (то есть двигателя с четырьмя обмотками) к классическому биполярному драйверу может быть выбран один из трех способов — униполярное, последовательное либо параллельное подключение обмоток двигателя.
Униполярное подключение шагового двигателя (схема электрическая)
.jpg)
Если требуется вращать двигатель на средних скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать лишь две из четырех обмоток.
Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге.
Биполярное последовательное подключение шагового двигателя (схема электрическая)
.jpg)
Наиболее эффективно для низкоскоростного диапазона рабочих скоростей двигателя.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр. 2 * R
При последовательном включении обмоток потребляемая мощность становится Iпослед. 2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр. 2 * R = Iпослед. 2 * 2* R, откуда
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Итак, характеристики ШД будут такими:
| Параметр | Значение |
|---|---|
| Iбиполяр.= 0.707 * Iуниполяр. | |
| Сопротивление обмотки, Ом | Rбиполяр. = 2 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр. = Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
Биполярное параллельное подключение шагового двигателя (схема электрическая)
.jpg)
Наиболее эффективно использование параллельного включения обмоток для высоких скоростей.
При таком типе подключения нужно увеличить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при параллельном включении обмоток требуемый ток — 2.8 А, то есть в 1.4 раза больше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При параллельном включении обмоток сопротивление объединенной обмотки уменьшаетсяв два раза (0.5 R).
Потребляемая мощность при униполярном включении — Iуниполяр. 2 * R
При параллельнном включении обмоток потребляемая мощность становится 0.5 * Iбиполяр. 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр. 2 * R = 0.5 * Iбиполяр. 2 * R, откуда Iбиполяр..= Iуниполяр. /√2, т.е.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением величины тока, пропускаемого через обмотки. Но так как ток увеличился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Итак, характеристики ШД будут такими:
| Параметр | Значение |
|---|---|
| Iбиполяр.= 1.4 * Iуниполяр. | |
| Сопротивление обмотки, Ом | Rбиполяр.. = 0.5 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр.. = 4 * Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
Пример: параметры ШД FL60STH86-2008AF для различных подключений
| Параметр | униполярное | параллельное | последовательное |
|---|---|---|---|
| 2 | 2.8 | 1.4 | |
| Сопротивление обмотки, Ом | 1.5 | 0.75 | 3 |
| Индуктивность обмотки, мГн | 3 | 1.5 | 6 |
| Крутящий момент, кг×см | 22 кг х см | 31 кг х см | 31 кг х см |
| Преимущества / недостатки | Средний момент при среднем энергопотреблении | Высокий момент при высоком потреблении тока | Высокий момент на низких скоростях при низком энергопотреблении |
| Максимальная эффективность | средний скоростной диапазон | высокоскоростной диапазон | низкоскоростной диапазон |
Подключение шагового двигателя 28BYJ-48-5V к Arduino. Часть 2.
В статье мы подробно разберем принцип работы шагового двигателя 28BYJ-48-5V, особенности и подключение драйвера на базе микросхемы ULN2003.
В предыдущей статье =>> мы кратко разобрали подключение шагового двигателя 28BYJ-48-5V к Arduino через драйвер.
Для подключения 4-х фазного шагового двигателя с редуктором 28BYJ-48-5V используется драйвер на базе микросхемы UNL2003A.

Добавим лишь немного теории о принципах работы шагового двигателя 28BYJ-48-5V.
Дискретное перемещение вала двигателя 28BYJ-48-5V позволяет повернуть вал ровно на 60 или 279 градусов и зафиксировать. Двигатель содержит две обмотки, причем каждая имеет отвод от середины. Получается 4 фазы. Отводы обмоток соединены вместе, как изображено на схеме, к ним подключен красный провод.
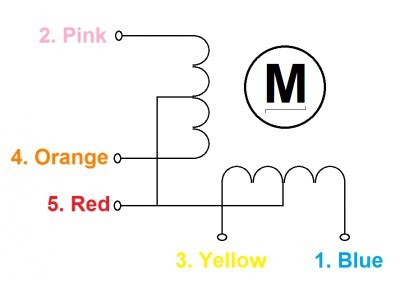
В результате каждый из контактов четырех фаз соединен с красным проводом.
Двигатель 28BYJ-48-5V относится к однополярным (униполярным) благодаря схеме соединения фаз. К красному проводу подключается питание. Фазы коммутируются силовой электроникой.
Для поворота на требуемый угол или выполнения некоторого количества оборотов на фазы двигателя подают серию импульсов, под действием которых вал поворачивается на серию шагов.
Импульс тока вызывает перемещение вала на угол обусловленный углом, занимаемым на роторе одним магнитом. Увеличение количества полюсов ротора уменьшает шаги, что позволяет нарастить точность позиционирования.
Чаще всего используются два способа управления шаговым двигателем 28BYJ-48-5V: 4 ступени импульсов и 8 ступеней.
В 4-ступенчатом управлении всегда подключены к питанию две из четырех обмоток двигателя – полношаговый метод управления.
Программная библиотека Stepper для Arduino IDE использует именно такой способ управления.
Если фазам по цвету проводов присвоить обозначения А синий, Б розовый, В желтый, Г оранжевый, то получим наименования фаз А, Б, В, Г. Их поочередное включение можно представить в виде последовательной смены сочетаний включенных фаз АБ-БВ-ВГ-ГА-АБ.
В 8-ступенчатой последовательности включается сначала одна фаза потом две, потом опять одна следующая, снова две и так далее. Управление мотором происходит в соответствии с последовательностью: А-АБ-Б-БВ-В-ВГ-Г-ГД-Д-ДА-А.
Драйвер моторов на микросхеме UNL2003A.
Существуют разные модели драйверов (контроллеров) шаговых двигателей. Среди них можно выделить самые популярные в DIY разработках на базе Arduino: L293, ULN2003, A3967SLB.
Как правило, шаговый двигатель 28-BYJ48 используют в паре с драйвером ULN2003.
Список драйверов на базе UNL2003A Вы найдете в конце статьи в разделе «Рекомендуемые товары:» или в категории Драйверы двигателей =>> нашего сайта Robot-Kit.ru.

Модуль управления (драйвер) на базе микросхемы UNL2003A предназначен для управления однополярным четырехфазным шаговым двигателем.
Микросхема ULN2003 по сути представляет собой массив транзисторов, включенных по схеме Дарлингтона. Микросхема ULN2003 позволяет управлять нагрузкой до 500 мА (один ключ).
Модуль принимает на себя нагрузку по силовой коммутации токов фаз мотора, защищая управляющую логическую схему от перегрузки по току и от перегрева. Например, при возрастании нагрузки на валу, в этот момент потребление тока увеличивается.
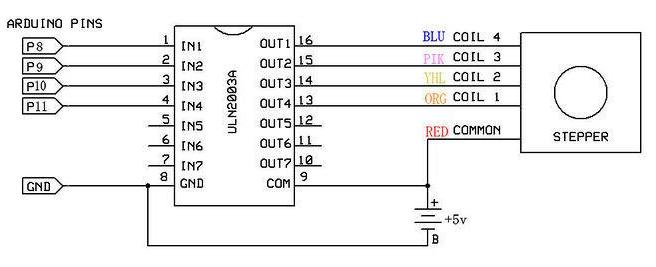
На плате модуля есть 4 входа для микроконтроллера: IN1..IN4. Пять выходов на двигатель, и два контакта питания. Также есть перемычка, разрывающая цепь питания двигателя.
Примечание. Плата согласования Arduino и шагового двигателя на основе UNL2003A имеет всего одну перемычку, которая замыкает 3 и 4 выводы. Данная перемычка подаёт питание на светодиоды с вывода 2 (так как выводы 2 и 3 спаяны вместе). Если на шаговый двигатель подаётся питание +5 В (как в нашем случае), то данная перемычка позволяет наблюдать за переключением выводов управления шаговым двигателем. Отслеживание свечения светодиодов помогает отладить схему соединения двигателя и управляющую программу. В дальнейшем для экономии тока питания перемычка снимается.
Подключение моторов на микросхеме ULN2003A
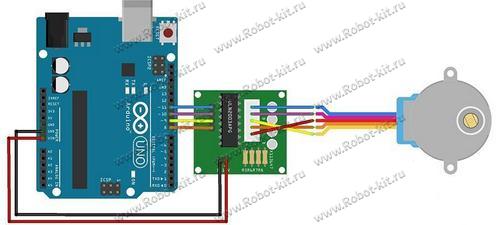
Схема соединения двигателя 28BYJ-48-5V и модуля управления ULN2003A.
Как правило, кабель двигателя 28BYJ-48-5V уже имеет разъем с ключом, который вставляется в плату драйвера только в правильном положении. В нашем случае это именно так.
Четыре управляющих входа, помеченные как IN1-IN4, должны быть подключены к четырем цифровым выводам Arduino. Подключаем питание GND к GND и VCC к VIN (не для постоянного использования). Помним, что не рекомендуется запитывать двигатель 28BYJ-48-5V (через драйвер) непосредственно от контакта 5V на плате Arduino. Если для питания Arduino и мотора используются различные источники питания, то необходимо объединить выводы «земля» источников вместе.
Ниже приведена схема подключения на примере модуля ULN2003, платы Arduino UNO R3 и двигателя 28BYJ-48-5V.
ПРОГРАММИРОВАНИЕ В ARDUINO IDE