Вентильный двигатель для учебного стенда Текст научной статьи по специальности «Электротехника, электронная техника, информационные технологии»
Аннотация научной статьи по электротехнике, электронной технике, информационным технологиям, автор научной работы — Виноградов К.М., Есарева Е.Н., Микерина О.С.
Статья посвящена выбору вентильного двигателя для учебного стенда . В связи модернизацией лабораторной базы средних и высших учебных заведений и использованием цифровых технологий в системах управления задача является актуальной. Рассмотрены различные варианты вентильных двигателей отечественного и зарубежного производства. Вентильный электродвигатель это разновидность электродвигателя постоянного тока, у которого щёточно-коллекторный узел заменен полупроводниковым коммутатором, управляемым датчиком положения ротора.
i Надоели баннеры? Вы всегда можете отключить рекламу.
Похожие темы научных работ по электротехнике, электронной технике, информационным технологиям , автор научной работы — Виноградов К.М., Есарева Е.Н., Микерина О.С.
Гибридное микроконтроллерное управление бесконтактным электродвигателем с постоянными магнитами
Магнитоэлектрический датчик положения оси ротора вентильного двигателя
Магнитоэлектрические вентильные двигатели в электроприводах производства ЗАО «ЧЭАЗ»
Дисковый вентильный электродвигатель с печатной обмоткой разомкнутого типа
Микропроцессорное управление электроприводами с вентильными двигателями для движителей необитаемых подводных аппаратов
i Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
i Надоели баннеры? Вы всегда можете отключить рекламу.
BRUSHLESS MOTOR FOR TRAINING STAND
The article is devoted to the selection of a brushless motor for a training stand . In connection with the modernization of the laboratory base of secondary and higher educational institutions and the use of digital technologies in control systems, the task is urgent. Various options for valve engines of domestic and foreign production are considered. A gate motor is a type of DC motor that has a brush-collector Assembly replaced by a semiconductor switch controlled by a rotor position sensor.
Текст научной работы на тему «Вентильный двигатель для учебного стенда»
Научно-образовательный журнал для студентов и преподавателей «StudNet» №10/2020
ВЕНТИЛЬНЫЙ ДВИГАТЕЛЬ ДЛЯ УЧЕБНОГО СТЕНДА
BRUSHLESS MOTOR FOR TRAINING STAND
Виноградов К.М., кандидат технических наук, доцент Заведующий кафедрой «Техника, технологии и строительство» Южно-Уральский государственный университет (НИУ) Россия, г. Челябинск
Есарева Е.Н., преподаватель кафедры «Техника, технологии и строительство» Южно-Уральский государственный университет (НИУ) Россия, г. Челябинск
Микерина О.С., преподаватель кафедры «Техника, технологии и строительство» Южно-Уральский государственный университет (НИУ) Россия, г. Челябинск Vinogradov K. M. vinogradovkm@susu.ru Sareva E. N. vinogradovkm@susu.ru Menkaure O. S. vinogradovkm@susu.ru
Статья посвящена выбору вентильного двигателя для учебного стенда. В связи модернизацией лабораторной базы средних и высших учебных заведений и использованием цифровых технологий в системах управления задача является актуальной. Рассмотрены различные варианты вентильных двигателей отечественного и зарубежного производства.
Вентильный электродвигатель — это разновидность электродвигателя постоянного тока, у которого щёточно-коллекторный узел заменен полупроводниковым коммутатором, управляемым датчиком положения ротора.
The article is devoted to the selection of a brushless motor for a training stand. In connection with the modernization of the laboratory base of secondary and higher educational institutions and the use of digital technologies in control systems, the task is urgent. Various options for valve engines of domestic and foreign production are considered.
A gate motor is a type of DC motor that has a brush-collector Assembly replaced by a semiconductor switch controlled by a rotor position sensor.
Ключевые слова: вентильный двигатель, синхронная машина с постоянными магнитами, шаговые двигатели, учебный стенд.
Keywords: brushless motor, permanent magnet synchronous machine, stepper motors, training stand.
Введение. Вентильный двигатель — это электродвигатель, который управляется полупроводниковыми ключами. Говоря точнее, вентильный двигатель это система, которая включает в себя электромеханический преобразователь (электрический двигатель) и полупроводниковый
преобразователь, как правило, коммутатор. Электродвигатель обычно представляет собой синхронную машину с возбуждением от постоянных магнитов. Электронный коммутатор представляет собой автономный инвертор, посредством которого осуществляется питание обмоток двигателя. Для работы также необходимы датчики тока, напряжения, скорости, положения и другие измерительные устройства [1].
Актуальность исследований. Обычно управление силовыми ключами инвертора осуществляется в функции положения ротора синхронного двигателя. Вентильные двигатели имеют свою «нишу» в различных отраслях промышленности. Например, в последнее время вентильные электродвигатели стали использоваться в тяговом электроприводе (электровоз ВЛ80ВР). Кроме того, они получили распространение в маломощных электроприводах рулевого управления летательных и подводных аппаратов, в электромеханических усилителях руля автомобилей. Также вентильные машины получили широкое
распространение в автономных стартер-генераторных установках гибридных автомобилей. Благодаря малым габаритам они также используются в мотор-колесах аккумуляторных индивидуальных транспортных средствах (электровелосипеды, инвалидные коляски различных разработок). Практически все бытовые устройства также имеют вентильные двигатели малой мощности -проигрыватели компакт-дисков.
Постоянное удешевление магнитных материалов, а также ускоряющееся развитие аппаратной базы систем управления и устройств силовой электроники сделали возможным применение вентильных двигателей в тех областях техники, где традиционно применялись только машины постоянного тока или специальные асинхронные двигатели. Это объясняется целым рядом конструктивных и технико-эксплуатационных преимуществ СДПМ по сравнению с другими существующими типами электрических машин, к числу которых можно отнести следующие: бесконтактность и отсутствие узлов, требующих обслуживания. Отсутствие у вентильных электродвигателей скользящих электрических контактов существенно повышает их ресурс и надежность по сравнению с электрическими машинами постоянного тока или асинхронными двигателями с фазным ротором, расширяет диапазон достижимых частот вращения. Кроме того, вентильным двигателям характерны: большая перегрузочная способность по моменту, высокое быстродействие в переходных процессах по моменту, высокий КПД.
Наиболее распространены следующие виды вентильных двигателей: бесконтактные двигатели постоянного тока и бесконтактные двигатели переменного тока [2]. Они отличаются конструктивными особенностями [3].
Бесконтактные (бесщеточные) двигатели постоянного тока (БДПТ), в англоязычной литературе называются «brushless DC motors». Представляют собой синхроную машину магнитоэлектрического возбуждения. На статоре расположена обмоткиа якоря, а на роторе — постоянные магниты. Бесконтактные двигатели переменного тока в англоязычной литературе называются «permanent-
magnet brushless AC motors». У таких машин фазные ЭДС вращения имеют форму синусоиды [1,3].
Для создания лабораторного стенда необходимо учитывать требования к безопасности электрического силового оборудования, управляемость современными микроконтроллерами [3,4]. Учитывая, специфику использования стенда, принято решение применять низковольтное оборудование — не более 12 В. Также необходимо предусмотреть высокую мобильность и соответственно небольшие габаритные размеры и массу стенда, возможность программирование с помощью ноутбука. Обобщенные требования к стенду: напряжение питания 12 В, потребляемый ток 3 А, мощность 45 Вт, длина 50 мм, количество фаз — 3.
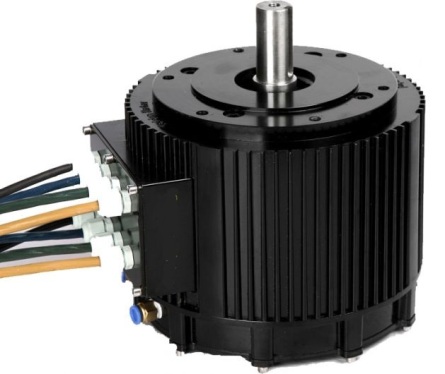
Выбор оборудования и элементов. На основании требований предъявляемых к двигателю, для проектируемого модуля «Вентильный двигатель» мобильного учебного стенда выбран вентильный двигатель FL42BLS01. Характеристики двигателя приведены в таблице 1, а внешний вид приведен на рисунке 1.
Таблица 1. Характеристики вентильного двигателя FL42BLS01
Параметр Единица измерения Значение
Напряжение питания В 24
Максимальный потребляемый ток А 5,4
Ток холостого хода А 0,5
Мощность, на выходном валу Вт 26
Номинальная скорость об/мин 4000
Количество фаз 3
Количество полюсов 8
Датчики положения ротора (датчики Холла) 3х120о
Номинальный крутящий момент кг*см 0,62
Максимальный крутящий момент кг*см 1,9
Сопротивление между линиями Ом 1,0
Индуктивность между линиями мГн 2,6
ЭДС обратной связи В/1000об/мин 3,66
Момент инерции ротора г*см2 24
Рисунок 1. Внешний вид вентильного двигателя FL42BLS01
Для управления вентильным двигателем будем использовать трехфазный автономный инвертор на полевых транзисторах. Это самая надежная и простая схема. Драйверы ключей подключаем к микроконтроллеру. На рисунке 2 приведена функциональная схема лабораторного стенда.
Рисунок 2. Внешний вид вентильного двигателя FL42BLS01
Для управления используем микроконтроллер ATmega8535. Он используется для подачи сигналов управления двигателем, ввода и обработки сигналов с датчиков положения ротора и элементов автоматического управления, расположенных на лицевой панели, и индикации. Также в схеме предусмотрена потенциальная опторазвязка FOD3180. Сигналы управления с микроконтроллера поступают в виде широтно-импульсной модуляции, несущая частота которой 31250 Гц. Высокоскоростная потенциальная опторазвязка, предназначена для передачи сигналов управления из слаботочной цепи в силовую. Она также необходима для предотвращения попадания помех в слаботочные цепи, и стабильной работы микроконтроллера. При работе от стационарной сети 220 В используются стабилизированные источники питания с выходным напряжением 12 В. Кроме того в схеме предусмотрены фильтры от низкочастотных и высокочастотных помех, как правило это конденсаторы. Технические характеристики микросхемы Б0В3180 представлены в таблице 2.
Таблица 2. Технические характеристики микросхемы FOD3180
Параметр Единица измерения Значение
Диапазон рабочих температур Со -40..+100
Пиковый ток на выходе А 2
Задержка срабатывания нс 200
Максимальная частота срабатываний кГц 250
Напряжение на выходе В 10-20
Напряжение изоляции В 5000
В схеме используем драйвера управления полевыми транзисторами 1Я2111. Эти драйверы предназначены для управления верхним и нижним ключами. Одним из недостатков полевых транзисторов является наличие паразитной емкости между истоком и затвором. Эта емкость препятствует мгновенному закрытию транзистора, при снятии напряжения с затвора. Драйвер создает временную задержку, между выключением верхнего ключа и включением
нижнего, в 700 нс, что препятствует возникновению кратковременного короткого замыкания в силовой цепи. Схема драйвера позволяет использовать в качестве управляющих сигналов — сигналы микроконтроллера. Технические характеристики драйвера ГО2111 представлены в таблице 3. Таблица 3. Технические характеристики драйвера Ж2111
Параметр Единица измерения Значение
Напряжение выходной цепи В 600
Напряжение питания В 10..20
Ток потребления А 0,42
Время включения \выключения нс 850\150
Время задержки нс 700
Для управления вентильным двигателем в стенде будем использовать полевые транзисторы ШР540М Они часто используются в качестве силовых ключей коммутирующих силовые цепи. В нашем случае частота переключения (частота ШИМ) 31250 Гц, которую могут обеспечить полевые транзисторы ШР540М Технические характеристики транзисторов представлены в таблице 4. Таблица 4. Технические характеристики полевых транзисторов ТКБ540К
Параметр Единица измерения Значение
Максимальное напряжение сток \ исток В 100
Максимальный ток сток \ исток А 20
Минимальное сопротивление сток \ исток Ом 0,052
Напряжение затвор \ исток В 10..20
Максимальная рассеиваемая мощность Вт 54
Стенд можно запитать от сети 220 В, либо от автономного источника 12 В, например, аккумуляторной батареи. Это удобно при проведении занятий в «полевых условиях». Имея небольшие габариты, стенд можно располагать в переносном дипломате.
1. Сапсалев А.В., Савин Н.П., Харитонов С.А., Овчинникова О.Е.
Инновационные, информационные и коммуникационные технологии. 2018. № 1. С. 369-373.
2. Зиннер, Л. Я. Вентильные двигатели постоянного и переменного тока, М. :
Энергоиздат , 1981 — 136с.
3. Трамперт, В.С. AVR-RISC микроконтроллеры: Архитектура,
аппаратные ресурсы, система команд, программирование, применение, Киев: МК-Пресс , 2006 — 459с.
4. Тавернье, К. PIC-микроконтроллеры: Практика применения, М.: ДМК-Пресс
5. Кенио, Т. Шаговые двигатели и их микропроцессорные системы управления,
М.: Энергоатомиздат , 1987 — 216с.
1. Sapsalev A.V., Savin N. P., Kharitonov S. A., Ovchinnikova O. E. Innovative, information and communication technologies. 2018. no. 1. Pp. 369-373.
2. Zinner, L. Ya. Valve motors of direct and alternating current, Moscow: Energoizdat, 1981-136s.
3. Trampert, V. S. AVR-RISC microcontrollers: Architecture, hardware resources, command system, programming, application, Kiev: MK-Press, 2006-459c.
4. Tavernier, K. PIC-microcontrollers: Practical application, Moscow: DMK-Press, 2003-270s.
5. Kenio, T. Stepper motors and their microprocessor control systems, Moscow: Energoatomizdat, 1987-216s.
Вентильный двигатель
Машины постоянного тока, как правило, имеют более высокие технико-экономические показатели (линейность характеристик, высокий КПД, малые габариты и пр.), чем машины переменного тока. Существенный недостаток — наличие щеточного аппарата, который снижает надежность, увеличивает момент инерции, создает радиопомехи, взрывоопасность и т.д. Поэтому, естественно, актуальна задача создания бесконтактного (бесколлекторного) двигателя постоянного тока.
Решение этой задачи оказалось возможным с появлением полупроводниковых приборов. В бесконтактном двигателе постоянного тока, именуемом вентильным двигателем постоянного тока , щеточный аппарат заменен полупроводниковым коммутатором, якорь неподвижен, ротор представляет собой постоянный магнит.
Принцип работы вентильного двигателя

Под вентильным двигателем понимают систему регулируемого электропривода, состоящую из электродвигателя переменного тока, конструктивно подобного синхронной машине, вентильного преобразователя и устройств управления, обеспечивающих коммутацию цепей обмоток электродвигателя в зависимости от положения ротора двигателя. В этом смысле вентильный двигатель подобен двигателю постоянного тока, в котором посредством коллекторного коммутатора подключается тот виток обмотки якоря, который находится под полюсами возбуждения.
Вентильный двигатель постоянного тока представляет собой сложное электромеханическое устройство, в котором сочетаются простейшая электрическая машина и электронная система управления.
Двигателям постоянного тока присущи серьезные недостатки, обусловленные, главным образом, наличием щеточно-коллекторного аппарата:
1. Недостаточная надежность коллекторного аппарата, необходимость его периодического обслуживания.
2. Ограниченные величины напряжения на якоре и, следовательно, мощности двигателей постоянного тока, что ограничивает их применение для высокоскоростных приводов большой мощности.
3. Ограниченная перегрузочная способность двигателей постоянного тока, ограничение темпа изменения тока якоря, что существенно для высокодинамичных электроприводов.
В вентильном двигателе указанные недостатки не проявляются, поскольку здесь щеточно-коллекторный коммутатор заменен бесконтактным коммутатором, выполненным на тиристорах (для приводов большой мощности) или на транзисторах (для приводов мощностью до 200кВт). Исходя из этого, вентильный двигатель, который конструктивно выполняется на базе синхронной машины, часто называют бесконтактным двигателем постоянного тока.
По управляемости вентильный двигатель также подобен двигателю постоянного тока — его скорость регулируется изменением величины подводимого постоянного напряжения. Благодаря своим хорошим регулировочным качествам вентильные двигатели получили широкое применение для привода различных роботов, металлорежущих станков, промышленных машин и механизмов.
Электропривод по системе транзисторный коммутатор-вентильный двигатель с постоянными магнитами
Вентильный двигатель рассматриваемого типа выполнен на базе трехфазной синхронной машины с постоянными магнитами на роторе. Трехфазные обмотки статора питаются постоянным током, подаваемым поочередно в две последовательно соединенные фазные обмотки. Переключение обмоток производится транзисторным коммутатором, выполненным по трехфазной мостовой схеме. Транзисторные ключи открываются и закрываются в зависимости от положения ротора двигателя. Схема вентильного двигателя представлена на рис.1.
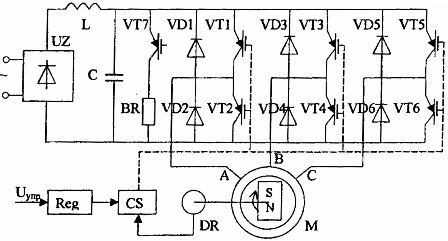
Рис.1. Схема вентильного двигателя с транзисторным коммутатором
Момент, создаваемый двигателем, определяется взаимодействием двух потоков:
• статора, создаваемого током в обмотках статора,
• ротора, создаваемого высокоэнергетическими постоянными магнитами (на основе сплавов самарий-кобальт и других).
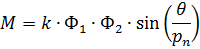
где: θ — пространственный угол между векторами потоков статора и ротора; рп — число пар полюсов.
Магнитный поток статора стремится повернуть ротор с постоянными магнитами, так, чтобы поток ротора совпал по направлению с потоком статора (вспомним магнитную стрелку, компаса).
Наибольший момент, создаваемый на валу ротора, будет при угле между векторами потоков равным π/2 и будет уменьшаться до нуля по мере сближения векторов потоков. Эта зависимость показана на рис.2.
Рассмотрим пространственную диаграмму векторов потоков, соответствующую двигательному режиму (при числе пар полюсов pn=1). Предположим, что в данный момент включены транзисторы VT3 и VT2, (см. схему рис.1). Тогда ток проходит через обмотку фазы В и в обратном направлении через обмотку фазы А. Результирующий вектор м.д.с. статора будет занимать в пространстве положение F3 (см.рис.3).
Если ротор занимает в этот момент положение, показанное на рис.4., то двигатель будет развивать в соответствии с 1 максимальный момент, под действием которого ротор будет поворачиваться по часовой стрелке. По мере уменьшения угла θ момент будет уменьшаться. Когда ротор повернется на 30° необходимо в соответствии с графиком на рис.2. переключить ток в фазах двигателя, так, чтобы результирующий вектор м.д.с. статора занял положение F4 (см. рис.3). Для этого нужно отключить транзистор VT3 и включить транзистор VT5.
Переключение фаз выполняет транзисторный коммутатор VT1-VT6, управляемый от датчика положения ротора DR; при этом угол θ поддерживается в пределах 90°±30°, что соответствует максимальному значению момента с наименьшими пульсациями. При рn=1 за один оборот ротора должно быть произведено шесть переключений, благодаря которым м.д.с. статора совершит полный оборот (см. рис.3). При числе пар полюсов больше единицы поворот вектора м.д.с. статора, а, следовательно, и ротора, составит 360/рn градусов.
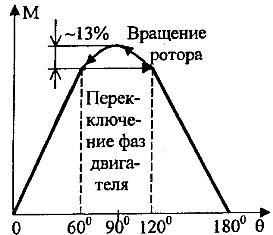
Рис.2. Зависимость момента двигателя от угла между векторами потоков статора и ротора (при рn=1)
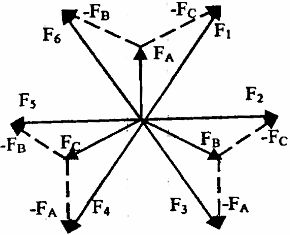
Рис.3. Пространственная диаграмма м.д.с. статора при переключении фаз вентильного двигателя
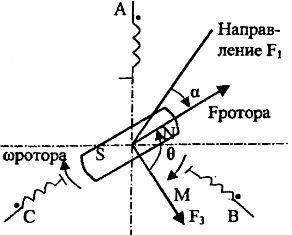
Рис.4. Пространственная диаграмма потоков в двигательном режиме
Регулирование величины момента производится изменением величины м.д.с. статора, т.е. изменением средней величины тока в обмотках статора

где: R1 — сопротивление обмотки статора.
Поскольку поток двигателя постоянен, то э.д.с. Ея, наводимая в двух последовательно включенных обмотках статора будет пропорциональна скорости ротора. Уравнение электрического равновесия для цепей статора будет

При отключении ключей ток в обмотках статора мгновенно не исчезает, а замыкается через обратные диоды и фильтровый конденсатор С.
Следовательно, регулируя напряжение питания двигателя U1, можно регулировать величину тока статора и момента двигателя

Нетрудно заметить, что полученные выражения подобны аналогичным выражениям для двигателя постоянного тока, вследствие чего механические характеристики вентильного двигателя в данной схеме подобны характеристикам двигателя постоянного тока независимого возбуждения при Ф=const.
Изменение напряжения питания вентильного двигателя в рассматриваемой схеме производится методом широтно-импульсного регулирования. Изменяя скважность импульсов транзисторов VT1-VT6 в периоды их включенного состояния, можно регулировать среднюю величину напряжения, подаваемого на обмотки статора двигателя.
Для осуществления режима торможения алгоритм работы транзисторного коммутатора должен быть изменен таким образом, чтобы вектор м.д.с. статора отставал от вектора потока ротора. Тогда момент двигателя станет отрицательным. Поскольку на входе преобразователя установлен неуправляемый выпрямитель, то рекуперация энергии торможения в данной схеме невозможна.
При торможении происходит подзаряд конденсатора фильтра С. Ограничение напряжения на конденсаторах осуществляется путем подключения разрядного сопротивления через транзистор VT7. Таким образом, энергия торможения рассеивается в разрядном сопротивлении.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
Элементы теории вентильного привода
В нефтяной промышленности используются погружные асинхронные и вентильные электродвигатели. Асинхронные электродвигатели в этой области применяются уже давно, вентильные — совсем недавно. В статье мы постараемся доступно рассказать об основных идеях, лежащих в основе вентильного привода, его сходство и различия с асинхронным собратом.
Определение вентильного двигателя
Вентильный электродвигатель (ВД) — синхронный бесколлекторный двигатель постоянного тока используемый совместно с системой электронного управления, обеспечивающей синхронизацию вращения электромагнитного поля с вращением ротора.
Обозначение в зарубежной литературе
-
BLDC — Brushless DC electric motor (бесколлекторный электродвигатель постоянного тока). PMSM — Permanent Magnet Synchronous Motor (синхронный двигатель с постоянными магнитами).
Конструкция
Конструктивно вентильный электродвигатель, как и любой электродвигатель, состоит из статора, ротора и узлов для поддержки ротора (подшипники).
Статор
Статор — неподвижная часть электродвигателя, содержащая обмотки якоря, служащая для создания вращающегося электромагнитного поля внутри двигателя.
Ротор
Ротор — вращающаяся часть электродвигателя, представляющая собой вал с электромагнитом или с постоянными магнитами. В первом случае к обмоткам ротора подключается источник постоянного тока.
В зависимости от количества магнитов, расположенных в поперечном сечении ротора, двигатель будет иметь то или иное количество полюсов.
В погружных вентильных электродвигателях используемых в нефтяной отрасли ротор содержит постоянные магниты. Как правило погружные ВД выпускаются 8-ми и 4-х полюсными.
При одной и той же частоте вращения электромагнитного поля статора частота вращения вентильного электродвигателя с большим количеством пар полюсов будет меньше. Так если скорость вращения 8-ми полюсного электродвигателя 1500 об/мин, то 4-х полюсный при той же частоте поля будет вращаться с частотой 3000 об/мин.
Принцип работы
Принцип работы вентильного электродвигателя
Вентильный электродвигатель (в отличие от асинхронного или коллекторных двигателей) не является самодостаточным и его работа невозможна без специальной электронной системы управления. Ее задача в зависимости от положения ротора подавать электрический ток на обмотки статора таким образом, чтобы создаваемое при этом электромагнитное поле притягивало полюса магнитов ротора, поворачивая тем самым его на определенный угол. Затем система управления подает ток на соседние обмотки статора и ротор продолжает вращение уже притягиваемый к ним. Таким образом статор создает вращающееся электромагнитное поле, а ротор синхронно следует за ним.
Здесь одно из ключевых отличий вентильного (синхронного) и асинхронного двигателей.
Принцип работы асинхронного электродвигателя
В асинхронном электродвигателе ротор также следует за вращающимся электромагнитным полем, однако с меньшей скоростью. Этот эффект называется «скольжением». И это неотъемлемое свойство асинхронного электродвигателя. Именно благодаря ему становится возможным работа асинхронного двигателя.
Его ротор представляет собой обмотку с короткозамкнутыми витками , по виду напоминающую беличью клетку прутья которой — стержни с торцов соединенные кольцами.
Вращающееся электромагнитное поле статора наводит в роторе ЭДС, в стержнях ротора начинает течь ток, в результате чего возникает магнитное поле, которое и заставляет вращаться ротор вслед за магнитным полем, создаваемым статором. Именно то, что поле статора движется относительно ротора, является условием возникновения электромагнитного поля в роторе. Если ротор заставить вращаться с той же скоростью, что и магнитное поле, создаваемое статором, то ЭДС в роторе наводится не будет! Таким образом скорость вращения ротора асинхронного двигателя всегда меньше скорости вращения поля.
Синхронный же двигатель не требует возбуждения ЭДС ротора от магнитного поля, создаваемого статором, магнитное поле здесь уже присутствует без его участия. Поэтому ротор синхронного электродвигателе вращается строго с частотой поля, создаваемого обмотками статора. Если установить частоту вращения синхронного двигателя равной 3000 об/мин, то это значит, что и магнитное поле двигателя, создаваемого обмотками статора, равна 3000 об/мин. Частота вращения асинхронного двигателя в тех же условиях будет 2910 об/мин.
Система управления вентильным электродвигателем
Как было уже сказано выше, вращение вентильного электродвигателя обеспечивает специальная электронная система управления. Ее общее название — инвертор (преобразователь).
Инвертором в данном случае называют электронную систему, осуществляющую подачу напряжения, частота которого не зависит от частоты питающего напряжения на обмотки электродвигателя.
Инвертором оснащаются не только синхронные (вентильные) электродвигатели, но асинхронные — там где требуется регулирование частоты вращения.
- 1. Управления коммутацией (6-ти пульсное управление);
- 2. Векторное управление.
Управление коммутацией
При управлении коммутацией (при трехфазной системе подключения) постоянное напряжение подается одновременно только на две фазы обмотки статора, третья обмотка остается не подключенной к источнику тока. При работе электродвигателя система управления следит за положением ротора, подавая напряжение определенной полярности на соответствующую пару обмоток таким образом, чтобы возбуждаемое в статоре магнитное поле увлекало за собой ротор, заставляя его вращаться. Частота вращения ротора регулируется величиной коммутируемого к обмоткам ротора постоянного напряжения. При этом частота коммутаций подстраивается под изменение частоты вращения ротора.
И еще раз обратим ваше внимание! Не частота вращения ротора изменяется от частоты вращения поля, а поле подстраивается под частоту вращения ротора. Инвертор регулирует частоту вращения ротора изменяя ток и/или напряжение коммутируемое к обмоткам.
Определение положения ротора
- при помощи датчиков (например датчика Холла);
- бездатчиковый.
В бездатчиковом методе при вращении двигателя определение положение ротора осуществляется по значению ЭДС, наводимой в свободной фазе (к которой в данной момент не подводится питающее напряжение) обмотки статора. При движении ротора ЭДС в свободной фазе меняется, и переход ее через 0 является «отметкой» положения ротора.
При таком методе управления в обмотках статора течет ток по форме близкий к трапецеидальному.
Данный способ управления характеризует простота и надежность, что позволяет управлять вентильным электродвигателем не только на коротких расстояниях, но и на длинных линиях — сотни метров и даже километры, что актуально для нефтяного погружного оборудования.
Векторное управление
Суть векторного управления в построении точной математической модели электродвигателя и управление ею — подачей частотно-модулируемого напряжения одновременно на все фазы двигателя такой частоты и величины (для каждой из фаз эти параметры будут индивидуальны в каждый момент времени), чтобы создаваемый в обмотках статора синусоидальный ток обеспечивал вращение ротора в наиболее благоприятных с электрической точки зрения условиях: сдвиг фаз магнитных потоков ротора и статора близок к 90 градусам.
Метод позволяет очень точно управлять электродвигателем. Метод наиболее ресурсоемкий в плане математических вычислений, однако развитие микропроцессорной техники позволяет компенсировать это. Применение его на коротких линиях очень эффективно, однако использование на длинных линиях ставит перед разработчиками множество преград, решение которых — нетривиальная задача.
Векторное управление или управление коммутацией?
С точки зрения математики, векторное управление наиболее естественное для вентильного электродвигателя. С точки зрения технологий и опыта эксплуатации в нефтяной промышленности — системы управления коммутацией. Однозначно ответить на вопрос, что же эффективнее — нельзя. В каждой конкретной ситуации на весах должно быть много факторов: и математика, и уровень технологий, и область применения, и экономическая эффективность, и подготовка персонала, эксплуатирующего оборудование.
Управление вентильным электродвигателем
Слово «вентильный» в названии двигателя происходит от слова «вентиль», обозначающего полупроводниковый ключ. Таким образом, привод в принципе можно назвать вентильным, если режим его работы регулируется специальным преобразователем на управляемых полупроводниковых ключах.
Непосредственно вентильный привод представляет собой электромеханическую систему, состоящую из синхронной машины с постоянными магнитами на роторе и электронного коммутатора (при помощи которого питаются обмотки статора) с системой автоматического управления на базе датчиков.
В тех многочисленных областях техники, где раньше традиционно устанавливали асинхронные двигатели или машины постоянного тока, сегодня часто можно встретить именно вентильные двигатели, поскольку магнитные материалы дешевеют, а база силовой полупроводниковой электроники и систем управления очень быстро развивается.
Синхронные двигатели с постоянными магнитами на роторе отличаются рядом преимуществ:
- нет щеточно-коллекторного узла, поэтому ресурс двигателя больше, а надежность его выше, чем у машин со скользящими контактами, к тому же диапазон рабочих скоростей выше;
- широкий диапазон питающих напряжений обмоток; допускается значительная перегрузка по моменту — более 5 раз;
- высокая динамика момента;
- возможна регулировка скорости с сохранением момента на низких скоростях или с сохранением мощности на высоких скоростях;
- КПД более 90%;
- минимальные потери на холостом ходу;
- небольшие массогабаритные характеристики.
Магниты состава «неодим-железо-бор» вполне способны создавать индукцию в зазоре порядка 0,8 Тл, то есть на уровне асинхронных машин, причем основные электромагнитные потери в таком роторе отсутствуют. Значит линейная нагрузка на ротор может быть повышена без повышения общих потерь.
Этим и обуславливается более высокая электромеханическая эффективность вентильных двигателей по сравнению с другими бесколлекторными машинами, например с асинхронными двигателями. По этой же причине вентильные двигатели занимают сегодня достойное место в каталогах ведущих зарубежных и отечественных производителей.

Управление ключами инвертора вентильного электродвигателя традиционно выполняется в функции положения его ротора. Высокие эксплуатационные характеристики, достигаемые таким образом, делают вентильный привод весьма перспективным в диапазоне малых и средних мощностей для систем автоматики, станков, роботов, манипуляторов, координатных устройств, линий обработки и сборки, систем наведения и слежения, для авиации, медицины, транспорта и т.д.
В частности, выпускаются тяговые дисковые вентильные двигатели мощностью более 100 кВт для городского электротранспорта. Здесь применяются магниты «неодим-железо-бор» с легирующими добавками, увеличивающими коэрцитивную силу и повышающими рабочую температуру магнитов до 170°С, чтобы мотор мог легко выдерживать кратковременные пятикратные перегрузки по току и по моменту.
Приводы рулевого управления подводных, наземных и летательных аппаратов, мотор-колеса, стиральные машины — много где сегодня находят полезное применение вентильные двигатели.
Вентильные двигатели бывают двух видов: постоянного тока (BLDC — brushless DC) и переменного тока (PMAC — permanent magnet AC). В двигателях постоянного тока трапециевидная ЭДС вращения в обмотках обусловлена расположением магнитов ротора и обмоток статора. В двигателях переменного тока ЭДС вращения синусоидальная. В рамках данной статьи мы поговорим об управлении вентильными двигателями очень распространенного вида — BLDC (постоянного тока).
Вентильный двигатель постоянного тока и принцип управления им BLDC моторы отличает наличие полупроводникового коммутатора, выступающего вместо щеточно-коллекторного узла, свойственного машинам постоянного тока с обмоткой на статоре и с магнитным ротором.
Переключение коммутатора вентильного мотора происходит в зависимости от текущего положения ротора (в функции положения ротора). Чаще всего обмотка статора трехфазная, такая же как у асинхронного двигателя с соединением звездой, а конструкция ротора с постоянными магнитами может быть различной.
Движущий момент в BLDC образуется в результате взаимодействия магнитных потоков статора и ротора: магнитный поток статора все время стремится как бы развернуть ротор в такое положение, чтобы магнитный поток установленных на нем постоянных магнитов совпал по направлению с магнитным потоком статора.
Аналогичным образом магнитное поле Земли ориентирует стрелку компаса — оно разворачивает ее «по полю». Датчик положения ротора позволяет сохранить угол между потоками постоянным на уровне 90±30°, в таком положении вращающий момент оказывается максимальным.
Полупроводниковый коммутатор для питания обмоток статора BLDC – это управляемый полупроводниковый преобразователь с жестким алгоритмом 120° коммутации напряжений или токов трех рабочих фаз.
Пример функциональной схемы силовой части преобразователя с возможностью генераторного торможения приведен на рисунке выше. Здесь инвертор с амплитудно-импульсной модуляцией выхода выполнен на IGBT-транзисторах, причем амплитуда регулируется благодаря широтно-импульсной модуляции на промежуточном звене постоянного тока.
Вообще для данной цели используются: тиристорные преобразователи частоты с автономным инвертором напряжения или тока с управлением по питанию и транзисторные преобразователи частоты с автономным инвертором напряжения с управлением в режиме ШИМ или с релейным регулированием тока на выходе.
В итоге электромеханические характеристики двигателя получаются аналогичными традиционным машинам постоянного тока с магнитоэлектрическим или независимым возбуждением, потому системы управления BLDC и строятся по классическому принципу подчиненного регулирования координат привода постоянного тока с контурами частоты вращения ротора и тока статора.
В качестве датчика для правильной работы коммутатора может применяться емкостной либо индуктивный дискретный сенсор, согласованный с мотором по полюсам, или система на базе датчиков Холла с постоянными магнитами.
Так или иначе, наличие датчика часто усложняет конструкцию машины в целом, к тому же в некоторых применениях датчик положения ротора вообще невозможно установить. Поэтому нередко на практике прибегают к использованию «бездатчиковых» систем управления. Алгоритм «бездатчикового» управления (sensorless) основывается на анализе данных прямо с клемм преобразователя и текущей частоты ротора или питания.
Наиболее популярный «бездатчиковый» алгоритм основан на вычислении ЭДС для одной из отключенных от питания в данный момент фаз двигателя. Фиксируется переход ЭДС отключенной фазы через ноль, определяется сдвиг в 90°, вычисляется момент времени, на который должна прийтись середина следующего токового импульса. Преимущество этого способа заключается в его простоте, однако есть и недостатки: на малых скоростях определить момент перехода через ноль достаточно непросто; задержка окажется точной только при постоянной скорости вращения.
Между тем, для более точного управления применяют усложненные методы оценки положения ротора: по потокосцеплению фаз, по третьей гармонике ЭДС на обмотках, по изменениям индуктивностей фазных обмоток.
Рассмотрим пример с наблюдением за потокосцеплениями. Известно, что пульсации момента BLDC при питании двигателя прямоугольными импульсами напряжения, достигают 25%, что приводит к неравномерности вращения, создает ограничение для регулировки скорости снизу. Поэтому в фазах статора при помощи замкнутых контуров регулирования формируются токи близкие по форме к прямоугольным.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика