Основные понятия. Характерным признаком синхронных машин является жесткая связь между частотой вращения ротора и частотой переменного тока в обмотке статора :
Характерным признаком синхронных машин является жесткая связь между частотой вращения ротора и частотой переменного тока в обмотке статора :
Другими словами, вращающееся магнитное поле статора и ротор синхронной машины вращаются синхронно, т. е. с одинаковой частотой.
По своей конструкции синхронные машины разделяются на явнополюсные и неявнополюсные. В явнополюсных синхронных машинах ротор имеет явно выраженные полюса, на которых располагают катушки обмотки возбуждения, питаемые постоянным током. Характерным признаком таких машин является различие магнитного сопротивления по продольной оси (по оси полюсов) и по поперечной оси (по оси, проходящей в межполюсном пространстве). Магнитное сопротивление потоку статора по продольной оси dd намного меньше магнитного сопротивления потоку статора по поперечной оси qq. В неявнополюсных синхронных машинах магнитные сопротивления по продольной и поперечной осям одинаковы, поскольку воздушный зазор у этих машин по периметру статора одинаков.
Конструкция статора синхронной машины в принципе не отличается от статора асинхронной машины. В обмотке статора в процессе работы машины индуцируются ЭДС и протекают токи, которые создают магнитодвижущую силу (МДС), максимальное значение которой
Эта МДС создает вращающееся магнитное поле, а в воздушном зазоре машины создается магнитная индукция, график распределения которой в пределах каждого полюсного деления зависит от конструкции ротора (рис. 13).
Для явнополюсной синхронной машины справедливо уравнение напряжений:
где – основная ЭДС синхронной машины, пропорциональная основному магнитному потоку синхронной машины ; – ЭДС реакции якоря синхронной машины по продольной оси, пропорциональная МДС реакции якоря по продольной оси ; – ЭДС реакции якоря по поперечной оси, пропорциональная МДС реакции якоря по поперечной оси ; – ЭДС рассеяния, обусловленная наличием магнитного потока рассеяния величина этой ЭДС пропорциональна индуктивному сопротивлению рассеяния обмотки статора
– активное падение напряжения в фазной обмотке статора, обычно этой величиной при решении задач пренебрегают ввиду ее небольшого значения.
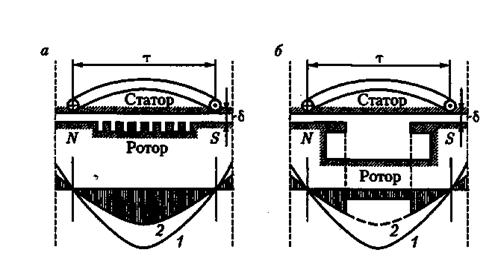
Рис. 13. Графики распределения магнитной индукции по поперечной оси
неявнополюсной (а)и явнополюсной (6)синхронных машин:
1 — график МДС; 2— график магнитной индукции
Для неявнополюсной синхронной машины уравнение напряжений имеет вид
где – ЭДС реакции якоря неявнополюсной синхронной машины.
Рассмотренным уравнениям напряжений соответствуют векторные диаграммы напряжений. Эти диаграммы приходится строить для определения либо основной ЭДС машины , либо напряжения обмотки статора . Следует иметь в виду, что уравнения напряжений и соответствующие им векторные диаграммы не учитывают магнитного насыщения магнитопровода синхронной машины, которое, как известно, влияет на величину индуктивных сопротивлений, вызывая их уменьшение. Учет этого насыщения представляет сложную задачу, поэтому при расчетах ЭДС и напряжений синх ронных машин обычно пользуются практической диаграммой ЭДС, которая учитывает состояние насыщения магнитной системы, вызванное действием реакции якоря при нагрузке синхронной машины. При построении практической диаграммы ЭДС намагничивающую силу реакции якоря не разлагают на продольную и поперечную составляющие, поэтому эта диаграмма может быть применена как при расчетах явнополюсных, так и неявнополюсных машин.
При решении задач, связанных либо с синхронными генераторами, включенными параллельно с сетью, либо с синхронными двигателями, пользуются угловыми характеристиками синхронных машин, представляющими собой зависимость электромагнитного момента М от угла нагрузки : М = f(). При этом следует помнить, что в явнополюсных синхронных машинах действуют два момента: основной и реактивный , а в неявнополюсных машинах — только основной момент:
Угол нагрузки соответствует номинальному моменту . Максимальный момент синхронной машины определяет перегрузочную способность синхронной машины, что имеет важное значение как для синхронных генераторов, работающих параллельно с сетью, так и для синхронных двигателей. В неявнополюсных синхронных машинах максимальный момент соответствует углу нагрузки = 90°, в явнополюсных машинах < 90° и обычно составляет 60 – 80° в зависимости от соотношения основного и реактивного электромагнитных моментов этой машины.
Для расчета критического угла нагрузки, определяющего перегрузочную способность явнополюсных синхронных машин, можно воспользоваться выражением:
При расчетах параметров синхронных машин применяют U-образные характеристики, представляющие собой зависимость тока статора от тока в обмотке возбуждения при постоянной нагрузке . При этом изменение тока в цепи статора происходит лишь за счет его реактивной составляющей . Поэтому регулировка величины тока возбуждения сопровождается одновременным изменением не только тока статора, но и коэффициента мощности . Активная составляющая тока статора при этом остается неизменной. Создавая режим перевозбуждения > , вызывают опережение по фазе тока сети относительно напряжения ,что способствует повышению коэффициента мощности в сети.
Энергетические характеристики в синхронной машине зависят от режима ее работы. Если машина работает в режиме генератора, то подводимая к генератору механическая мощность определяется вращающим моментом приводного двигателя и частотой вращения
Часть этой мощности расходуется на покрытие механических , магнитных и добавочных потерь. Если возбуждение генератора происходит от возбудителя, приводимого во вращение от общего приводного двигателя, то к перечисленным потерям добавляются еще и потери на возбуждение
где и – напряжение и ток в цепи возбуждения; –КПД возбудителя.
Оставшаяся после вычитания перечисленных потерь мощность, представляет собой электромагнитную мощность генератора , которая передается на статор генератора электромагнитным путем. Полезная мощность на выходе генератора меньше электромагнитной мощности на величину электрических потерь в обмотке статора
Суммарные потери синхронного генератора
Полезная мощность генератора
где – полная мощность на выходе генератора, В×A; – коэффициент мощности в цепи нагрузки генератора.
Если синхронная машина работает в режиме двигателя, то виды потерь остаются прежними, но электрическая мощность на входе двигателя
а мощность на выходе двигателя является механической
Коэффициент полезного действия синхронной машины
Задачи
Понравилась статья? Добавь ее в закладку (CTRL+D) и не забудь поделиться с друзьями:
Что является характерным признаком синхронных машин
1 Технический институт, филиал ФГАОУ ВПО «Северо-Восточный федеральный университет им. М.К. Аммосова»
Все электроприводы содержат регуляторы тока и скорости, с помощью которых, путём воздействия на силовой преобразователь достигается желаемый динамический режим привода. Однако в способах получения математической модели в приводах переменного и постоянного тока имеется существенное различие. В статьи показано, что в целях оптимизации систем управления электроприводов, переменного тока, одновременное использование блоков моделирования напряжения и тока, обеспечивающие возможность применения в качестве датчика простого импульсного датчика в грубом механическом исполнения. Точка отсчета определяется при помощи установки счетчиков, контролирующих процесс возбуждения по упомянутому способу определения координат, это дает возможность машине переменного тока проявлять себя как полностью скомпенсированная машина постоянного тока. Наряду с регулированием частоты вращения осуществляется регулирование в функции пути, скорости и ускорения, что обеспечивает снижение пика мощности.

системы управления
многосвязная система
блок моделирования
частота вращения
двигатель постоянного и переменного тока
1. Алтухов, Е.И. Алгоритмическое обеспечение микропроцессорного управления машинами и установками цикличного действия / Е.И. Алтухов, Т.В. Чермалых // Вестник Киевского политехнического института. «Горная электромеханика и автоматика». – 1993. – Вып. 24. – С. 20–29.
2. Бутковский А.Г. Характеристики систем с распределенными параметрами: Справочное пособие. – М.: Наука, 1979. – 224 с.
3. Микка Х. Подъёмная машина для горной промышленности с приводом переменного тока с частотным регулированием // Глюкауф. – 1984. – № 9. – С. 22–30.
4. Чермалых, В.М. Построение адаптивных систем позиционного управления электроприводами машин и установок / В.М. Чермалых, Ю.А. Афанасьев, Т.В. Чермалых // Изв. вузов. Горный журнал. – 1992. – № 10. – С.73–77.
5. Чермалых, Т.В. Системы оптимального управления позиционным тиристорным электроприводом с многоканальной задающей моделью / Т.В. Чермалых, Халед Махди, Камил Шабо / Институт электродинамики НАН Украины, 1994. – С. 10–11.
В настоящее время для возможности регулирования частоты вращения и тока двигателя любого типа наиболее приемлемым считается преобразователь, коммутируемый (ведомый) сетью, приведенный на рис. 1, в виде двунаправленной шести импульсной реверсивной тиристорной схемы. Преобразователи этого типа выпускаются в широком диапазоне мощностей вплоть до уровня 10–20 МВт, требуемых для самых крупных электроприводов.
Регулирование такого привода осуществляется посредством изменения формы управляющих импульсов подаваемых на тиристоры преобразователя C1 и С2, в зависимости от того, какие направления тока и момента требуются для поддержания заданной частоты вращения. Схема управления, показанная на рис. 1, типична для любых регулируемых электроприводов, будь то приводы постоянного или переменного тока. Она содержит внутренний контур регулирования тока, обеспечивающий быстрое нарастание тока якоря и вращающего момента, и внешний контур регулирования частоты вращения с соответствующим регулятором скорости (РС), вырабатывающим сигнал, который является задающим на входе регулятора тока (РТ). Посредством ограничения заданной величины тока обеспечивается защита преобразователя, привода и механической нагрузки от случайных бросков тока в якорной цепи, имеющей низкое сопротивление. Внутренний контур играет важную роль в деле защиты преобразователей и электроприводов всех видов. В случае аварийной ситуации единственным средством защиты является автоматический выключатель [5].

Рис. 1. Схема управления тиристорным электроприводом
Упомянутый выше преобразователь, коммутируемый сетью, имеет хорошую динамическую характеристику, поскольку эта схема характеризуется шестью равномерно расположенными интервалами включенного состояния (по числу тиристоров) на каждом периоде частоты напряжения. При частоте питания сети 50 Гц моменты включения тиристоров в установившемся режиме будут отстоять друг от друга всего лишь на 3,3 мс. Для крупных приводов используется несколько шести импульсных преобразователей со сдвигом по фазе питающих напряжений, что позволяет сделать интервалы между моментами включения еще меньше. Поскольку быстродействие контура регулирования тока определяется, в конечном счете, дискретным принципом работы преобразователя, эта задержка управления приводит в результате к эквивалентной постоянной времени токового контура, не превышающей 10 мс, что вполне приемлемо для большинства приводов.
Динамические характеристики контура регулирования частоты вращения зависят от момента инерции привода; быстродействие этого контура неизбежно получается более низким, чем у контура регулирования тока, так как регулятор частоты вращения воздействует на вращающий момент через контур тока. Сказанное справедливо и в отношении возможного в схеме управления положением электропривода внешнего контура регулирования угла поворота.
Следует отметить, что машина постоянного тока идеально подходила бы для регулируемого электропривода, если бы не наличие коллектора, который:
– ограничивает номинальную мощность и частоту вращения;
– накладывает ограничения на условия окружающей среды, в которых может работать данная электрическая машина;
– препятствует получению полного вращающего момента в режиме короткого замыкания (при заторможенном роторе) в интервале свыше нескольких секунд;
– подвержен износу и требует периодического обслуживания;
– увеличивает массу и момент инерции двигателя.
Кроме этого, электрические машины постоянного тока имеют достаточно сложную конструкцию, требующую значительных затрат на их изготовление.
Учитывая вышесказанное, становится ясно, почему в последние годы все более широкое применение получают приводы переменного тока с регулируемой частотой вращения. Для питания привода переменного тока требуется внешний преобразователь, способный вырабатывать переменные напряжения и токи с регулируемыми амплитудой, частотой и фазой. Процесс преобразования питающего напряжения переменной частоты и фазы осуществляется обычно в два этапа с использованием промежуточного звена постоянного тока, как показано на рис. 2.
Преобразователь на стороне питающей сети, подающий в звено постоянного тока изменяемые напряжение и ток, может относиться к типу преобразователей, коммутируемых сетью, как и приведенный на рис. 1. Преобразователь на стороне электрической машины (инвертор) необходим для выработки переменного напряжения с изменяемой амплитудой и частотой. При рекуперации энергии выпрямитель и инвертор меняются местами. Преимущество по отношению к машине постоянного тока состоит в том, что подвод основного электропитания осуществляется у них со стороны статора. Это позволяет избежать проблем, связанных с наличием скользящих контактов при высокой мощности и частоте вращения.
Характерной особенностью всех синхронных двигателей, питаемых от преобразователя, является то, что их нельзя вывести из синхронизма, поскольку аналогично машине постоянного тока последовательность коммутаций инвертора задается в них положением ротора двигателя. В установившемся состоянии кривая тока статора синхронной машины поддерживается в синхронизме с ротором. Следовательно, лучше всего управлять током статора в координатах, связанных с ротором, используя преобразование координат, основанное на величине угла поворота [4].

Рис. 2. Преобразование питающего напряжения с использованием звена постоянного тока

Рис. 3. Система управления электроприводом с асинхронным двигателем
Особенностью асинхронных машин является то, что токи в короткозамкнутой обмотке ротора индуцируются магнитным потоком статора. Поэтому инвертор должен обеспечивать двигатель не только активной, но также и реактивной мощностью для подмагничивания. Существуют различные варианты комбинации асинхронного двигателя с силовым преобразователем, которые являются перспективными для регулируемого электропривода, начиная от очень гибкого решения с почти синусоидальным низкочастотным питанием ротора от циклоконвертора до упрощенных вариантов, когда мощность скольжения через диодный выпрямитель и инвертор возвращается в питающую сеть [3].
На рис. 3 показана система управления электроприводом с асинхронным двигателем с фазным ротором и статическим преобразователем, в котором мощность, извлекаемая из роторной обмотки, передается в сеть через преобразователь со звеном постоянного тока, содержащий выпрямитель и инвертор с фазовым управлением на стороне сети питания. Регулирование осуществляется посредством изменения угла управления тиристоров инвертора, что вызывает изменение встречного напряжения в звене постоянного тока. Это приводит к соответствующему изменению напряжения обмотки ротора, а следовательно, и частоты вращения ротора, с тем, чтобы поддержать заданный ток в промежуточном звене, т.е. вращающий момент. Система управления довольно проста и аналогична системе управления приводом с машиной постоянного тока, содержащей внутренний контур тока и внешний контур регулирования частоты вращения.
В двигательном режиме такой привод может работать только ниже синхронной скорости; именно поэтому он носит название субсинхронного преобразовательного каскада. Однако и здесь возможен генераторный режим при работе с частотой вращения выше синхронной.
Выполненный краткий обзор основных современных электроприводов свидетельствует о том, что с точки зрения построения систем автоматического управления они идентичны. Все содержат регуляторы тока и скорости, с помощью которых, путем воздействия на силовой преобразователь достигается желаемый динамический режим привода. Однако в способах получения математической модели в приводах переменного и постоянного тока имеется существенное различие.
Машины постоянного тока имеют сложную механическую конструкцию, однако, благодаря тому, что оси магнитных полей неподвижны и взаимно перпендикулярны, динамика их управления проста. В случае, машин переменного тока ситуация обратная: поскольку коммутация здесь осуществляется не в самой машине, ее конструкция проста, но из-за различия вращающихся магнитных полей структура управления гораздо сложнее. В наибольшей степени это проявляется у самого простого асинхронного двигателя с короткозамкнутым ротором, у которого важнейшие параметры (токи ротора) не могут быть непосредственно измерены. Если достаточно обеспечить работу только в одном квадранте механической характеристики, то применяются простые разомкнутые системы регулирования, когда поддержание постоянства потока в машине производится с использованием зависимостей напряжения статора от частоты тока ротора или тока статора от частоты тока ротора, полученных на основе статической модели машины.
Для проектирования приводов с высокими показателями, соответствующими быстрым изменениям момента и скорости вращения, получено общее решение данной задачи в форме управления в движущихся координатах. В случае синхронного двигателя с возбуждением постоянным током со стороны ротора этими координатами являются просто координаты ротора, определяемые углом поворота ротора. Разбивая вектор тока статора  , определяющий амплитуду и угловое положение магнитодвижущей силы статора, на параллельную и перпендикулярную оси ротора составляющие, можно непосредственно получить составляющую тока статора
, определяющий амплитуду и угловое положение магнитодвижущей силы статора, на параллельную и перпендикулярную оси ротора составляющие, можно непосредственно получить составляющую тока статора  , определяющую электромагнитный момент подобно току якоря машины постоянного тока и используемую для формирования управляющего воздействия.
, определяющую электромагнитный момент подобно току якоря машины постоянного тока и используемую для формирования управляющего воздействия.
Составляющие вектора тока статора определяются посредством измерения, и с помощью угла поворота ротора преобразуются в координаты ротора, в результате чего получается продольная  и поперечная
и поперечная  составляющие тока. Замкнутое регулирование, таким образом, осуществляется в координатах ротора. Контуры регулирования момента, частоты вращения и положения охватывают друг друга, что характерно для приводов постоянного тока.
составляющие тока. Замкнутое регулирование, таким образом, осуществляется в координатах ротора. Контуры регулирования момента, частоты вращения и положения охватывают друг друга, что характерно для приводов постоянного тока.
Выходной сигнал самого внутреннего регулятора (регулятора тока) привода представляет собой вектор заданной величины тока [1].
Машины переменного тока, управляемые по положению ротора имеют систему, ориентированную по полю. Характерными признаками данного режима работы является то, что в такой машине существует жесткое соотношение между пространственным положением намагничивающей силы ротора и вектором потока. Ток статора  , определяющий магнитодвижущую силу (рис. 4), может задаваться независимыми друг от друга компонентами
, определяющий магнитодвижущую силу (рис. 4), может задаваться независимыми друг от друга компонентами  и
и  – моментообразующая составляющая;
– моментообразующая составляющая;  – намагничивающая составляющая; * – заданная величина.
– намагничивающая составляющая; * – заданная величина.

Рис. 4. Векторная диаграмма машины переменного тока
Составляющая  так же, как и при регулировании машин постоянного тока задается регулятором частоты вращения (рис. 5). При воздействии на намагничивающую появляется возможность выбирать желаемый коэффициент мощности машины
так же, как и при регулировании машин постоянного тока задается регулятором частоты вращения (рис. 5). При воздействии на намагничивающую появляется возможность выбирать желаемый коэффициент мощности машины  . В первую очередь с помощью заданных базовых величин sinjs и cosjs, которые описывают направление вектора потока. Используя блок вращения вектора VD, можно получить обе составляющие
. В первую очередь с помощью заданных базовых величин sinjs и cosjs, которые описывают направление вектора потока. Используя блок вращения вектора VD, можно получить обе составляющие  и
и  на основе компонентов
на основе компонентов  и
и  . Они являются задаваемыми величинами вращающегося вектора магнитодвижущей силы статора для двух расположенных перпендикуляр, но одна относительно другой осей обмоток, затем составляющие
. Они являются задаваемыми величинами вращающегося вектора магнитодвижущей силы статора для двух расположенных перпендикуляр, но одна относительно другой осей обмоток, затем составляющие  и
и  замещаются в трехфазной системе переменного тока и подаются в систему регулирования тока как заданные величины
замещаются в трехфазной системе переменного тока и подаются в систему регулирования тока как заданные величины  для токов
для токов  . Данная система регулирования, благодаря тому, что она рассчитана на пульсирующий ток и здесь осуществляется опережающее регулирование, обеспечивает особенно благоприятное поведение системы.
. Данная система регулирования, благодаря тому, что она рассчитана на пульсирующий ток и здесь осуществляется опережающее регулирование, обеспечивает особенно благоприятное поведение системы.
Две базовые величины sinjs и cosjs которые представляют положения вектора потока в неподвижной системе координат статора, определяются по замерам напряжений и токов с помощью электронного устройства блока моделирования напряжения М1. Кроме того, в этом блоке определяется также величина потока Ф и величина, пропорциональная частоте вращения S, которая при установившемся режиме соответствует фактическому числу оборотов.
Для компенсации реакции якоря с помощью аналогового электронного устройства – блока моделирования тока М2 задается такое значение тока возбуждения, при котором поток остается постоянным и при переходных процессах. Помимо того, суперпозиционный регулятор потока обеспечивает при установившемся режиме точное выдерживание величины потока. Фактическая величина потока определяется в блоке моделирования напряжения М1.
Управляемая таким образом машина переменного тока с возбуждением постоянным током, как по режиму работы, так и по системе регулирования тока, а также по суперпозиционному регулированию частоты вращения и нагружения соответствует приводу постоянного тока. В то время, когда машина находится в неподвижном состоянии, величина напряжения оказывается весьма незначительной.

В установившемся режиме с частотой вращения ниже 10 % номинальной необходимо осуществлять управление блоком моделирования. Для управления используется положение ротора λ (электрический угол поворота ротора), скорректированное по внутреннему углу выбега ротора. Зависящий от нагрузки угол выбега ротора определяется блоком моделирования тока М2. Цифровой датчик частоты вращения угла представлены в виде синусов и суммируются в блоке вращения вектора. При увеличении вращения управление блоком моделирования напряжения ослабляется.


Рис. 5. Схема частотно-управляемого привода с синхронным двигателем
Одновременное использование в работе блоков М1 и М2 обеспечивает возможность применения в качестве датчика простого импульсного датчика в грубом механическом исполнении. Точка отсчета определяется при помощи установки счетчиков, контролирующих процесс возбуждения по упомянутому выше способу определения координат. Благодаря описанному образу действия системы регулирования машина переменного тока проявляет себя как полностью скомпенсированная машина постоянного тока.
Наряду с регулированием частоты вращения осуществляется регулирование в функции пути. Заданная величина скорости формируется при этом в цифровом регуляторе хода. При автоматическом режиме регулирование в функции пути задает желаемую программу. В регуляторе пути сравнивается запрограммированное значение с фактическим положением рабочего органа. При этом непосредственно формируется сигнал заданной скорости по величине и знаку. Регулирование в функции пути обеспечивает оптимальный по времени рабочий цикл при поддержании граничных величин скорости. Ускорения, замедления и скорости нарастания ускорения. Датчик скорости в период запуска задает примерно до скорости, равной двум третям полной скорости, линейную, а для последней трети – параболическую форму заданной величины (линейное уменьшение величины ускорения до нуля). Благодаря этому пик мощности к концу ускорения снижается приблизительно на 30 % (ограничение мощности).
Для каждого электродвигателя двухдвигательного привода имеются отдельные системы регулирования тока, потока, а также «транс-векторное регулирование», включающее блоки моделирования напряжения, тока и «блок вращения вектора», в то время как суперпозиционное регулирование частоты вращения и регулирование в функции пути задают для обоих электродвигателей общую заданную величину вращающего момента.
Благодаря этому обеспечивается равномерное распределение нагрузки между обоими электродвигателями [2].
Устройство и принцип действия синхронной машины

Синхронные машины вне зависимости от режима работы состоят из двух основных частей: неподвижного статора, выполняющего функции якоря и ротора, вращающегося внутри статора и служащего индуктором (рис. 4.1).
Статор трехфазной синхронной машины аналогичен статору трехфазного асинхронного двигателя. Он состоит из корпуса /, цилиндрического сердечника 2, набранного из отдельных пластин электротехнической стали, и трехфазной обмотки 3, уложенной в пазы сердечника.
Ротор синхронной машины представляет собой электромагнит постоянного тока, который создает магнитное поле, вращающееся вместе с ротором. Ротор имеет обмотку возбуждения 4, которая через специальные контактные кольца 5 питается постоянным током от выпрямителя или от небольшого генератора постоянного тока, называемого возбудителем.
В отечественной энергетике также используются синхронные машины с «бесщеточным» возбуждением. Обмотка ротора таких машин питается от выпрямителя, вращающегося вместе с ротором. Выпрямитель в свою очередь получает питание от возбудителя, имеющего вращающуюся вместе с ротором трехфазную обмотку, возбуждаемую неподвижными постоянными магнитами.
Роторы синхронных машин бывают двух типов: с явно выраженными и неявно выраженными полюсами.
Роторы с явно выраженными полюсами (рис. 4.1) применяются в сравнительно тихоходных машинах (80 – 1000 об/мин), например гидрогенераторах; они имеют значительноечисло полюсов. Конструктивно роторы этого типа (рис. 4.2) состоят из вала 6, ступицы 7, полюсов 8, укрепляемых в шлицах ступицы, полюсных катушек 4 возбуждения, размещенных на полюсах.
Поверхность полюсного наконечника полюсов имеет такой профиль, что магнитная индукция в воздушном зазоре машины распределяется примерно по синусоидальному закону. Для быстроходных машин (турбогенераторы, синхронные двигатели, турбокомпрессоры и т. п.) явнополюсная конструкция ротора неприменима из-за сравнительно большого диаметра ротора и возникающих в связи с этим недопустимо больших центробежных сил.
Большей механической прочностью обладает ротор с неявно выраженными полюсами. Он состоит (рис. 4.3) из сердечника 1 и обмотки возбуждения 2. Сердечник изготовляется из стальной поковки цилиндрической формы. На его внешней поверхности фрезеруются пазы, в которые закладывается обмотка возбуждения.
Обмотка возбуждения распределяется в пазах сердечника так, чтобы создаваемое ею магнитное поле было распределено в пространстве по закону, близкому к синусоидальному.
Принцип работы и ЭДС синхронного генератора.
Работа синхронного генератора основана на явлении электромагнитной индукции. При холостом ходе обмотка якоря (статора) разомкнута, и магнитное поле машины образуется только обмоткой возбуждения ротора (рис. 4.4).

При вращении ротора синхронного генератора от проводного двигателя ПД с постоянной частотой nо магнитное поле ротора, пересекая проводники фазных обмоток статора AX, BY, CZ (рис.4.4,а) наводит в них ЭДС , где B – магнитная индукция в воздушном зазоре между статором и ротором; l – активная длина проводника; – линейная скорость пересечения проводников магнитным полем.
Выше отмечалось, что индукция В в воздушном зазоре распределена по синусоидальному закону , где — угол, отсчитываемый от нейтральной линии, поэтому ЭДС в одном проводнике .
Обозначив , получим , т.е. ЭДС в проводниках обмоток статора изменяется по синусоидальному закону.
ЭДС отдельных проводников каждой обмотки статора сдвинуты по фазе относительно друг друга, поэтому они суммируются геометрически (аналогично ЭДС статора асинхронного двигателя – см. п. 3.8.1). Действующее значение ЭДС одной фазы определяется выражением:
где – обмоточный коэффициент; – частота синусоидальных ЭДС; — число витков одной фазы обмотки статора; — число пар полюсов; – максимальный магнитный поток полюса ротора; – синхронная частота вращения.
Катушки отдельных фаз статора сдвинуты в пространстве на электрический угол, равный 120 0 , и их ЭДС образуют симметричную трёхфазную систему.
Изменяя ток возбуждения , можно регулировать магнитный поток ротора и пропорциональную ему ЭДС генератора. На рис. 4.5 представлена зависимость , снятая при номинальной частоте вращения .
Эта зависимость называется характеристикой холостого хода. Форма характеристики напоминает форму кривой намагничивания ферромагнитного сердечника. Характерной особенностью её является отсутствие пропорциональности между магнитным потоком и током возбуждения , что обусловлено явлением насыщения магнитной системы машины.
Принцип действия и вращающий момент синхронного двигателя.
Принцип действия синхронного двигателя основан на явлении притяжения разноименных полюсов двух магнитных полей – статора и ротора. Вращающееся поле статора с полюсами N и S создается при питании обмоток статора от трёхфазной сети аналогично вращающемуся полю асинхронного двигателя (на рис. 4.6 полюсы статора N и S показаны штриховкой, вращаются они против часовой стрелки с частотой ). Поле ротора создается постоянным током, протекающим по обмотке ротора.
Предположим, что ротор каким-либо способом разогнан до синхронной частоты вращения против часовой стрелки. Тогда полюсы ротора и будут вращаться с частотой ; произойдет «сцепление» этих полюсов с разноименными полюсами статора и (см. штрихованные линии на рис. 4.6).
В режиме идеального холостого хода (момент сопротивления ) оси магнитных полей статора и ротора совпадают (рис. 4.6.а). При этом на полюсы ротора действуют радиальные силы и , которые не создают ни вращающего момента, ни момента сопротивления.
Если к валу машины приложить механическую нагрузку, которая создает момент сопротивления , ось ротора и его полюсов , сместится в сторону отставания на угол (рис. 4.6,б). Теперь вращающее поле статора как бы “ведёт” за собой поле ротора и сам ротор. Тангенциальные составляющие и создают вращающий момент , где — радиус ротора.
Машина работает в двигательном режиме, её вращающий момент преодолевает момент сопротивления механической нагрузки.
При увеличении момента механической нагрузки на валу ротора угол увеличивается (до некоторого предела), что приводит к увеличению вращающегося момента двигателя , причем частота вращения ротора остается неизменной и равной .
Противодействующий момент и противо-ЭДС.
При работе синхронной машины в режиме нагруженного генератора (на схеме рис. 4.4,б нагрузка Zн подключена к обмоткам статора через выключатель Q) по обмоткам статора протекает ток, который создает своё вращающееся магнитное поле. В генераторном режиме, в отличие от двигательного режима, полюсы ротора опережают на угол полюсы магнитного поля статора.
В результате взаимодействия разноименных полюсов статора и ротора на ротор действует момент, направленный против вращения, т.е. тормозной момент . В установившемся режиме момент уравновешивает вращающийся момент приводного двигателя: .
При работе синхронной машины в режиме двигателя поле ротора пересекает витки трехфазной обмотки статора и в ней индуцируется ЭДС, которая согласно правилу Ленца действует навстречу току статора. По этой причине её называют противо-ЭДС. В установившемся режиме противо-ЭДС почти полностью уравновешивает напряжение сети .
Таким образом, при работе синхронной машины на нагрузку (электрическую или механическую) в обмотке статора индуцируется ЭДС Е и возникает момент ротора .
Реакция якоря в синхронной машине.
Реакция якоря – это воздействие поля якоря (статора) на магнитное поле машины. При работе синхронной машины на нагрузку (электрическую в режиме генератора и механическую в режиме двигателя) по обмоткам статора (якоря) протекают синусоидальные токи, которые создают вращающееся магнитное поле статора. Ротор имеет частоту вращения , поэтому частота ЭДС и тока статора , где — число пар полюсов машины.
Частота вращения магнитного поля статора .
Следовательно, поля ротора и статора вращаются с одной и той же частотой ; они взаимодействуют между собой и образуют результирующее вращающееся магнитное поле машины. Взаимодействие полей зависит от характера нагрузки и режима работы машины.
Рассмотрим реакцию якоря на примере двухполюсного синхронного генератора с неявно выраженными полюсами ротора, работающего на различную по характеру нагрузку .
При активной нагрузке с сопротивлением R ЭДС фазы обмотки статора и её ток совпадают по фазе и достигают максимума в тот момент, когда ось mm1 магнитного потока ротора Ф0 перпендикулярна оси nn1 катушки обмотки статора (например, АX на рис. 4.7,а).
Магнитный поток статора Фя замыкается по сердечникам статора и ротора через воздушный зазор. Таким образом, в случае активной нагрузки ось потока ротора Ф0 опережает ось потока статора Фя на электрический угол, равный 90 0 (поперечная реакция якоря).
При этом результирующий магнитный поток машины (ось qq1) поворачивается относительно потока ротора Ф0 на угол в направлении, противоположном направлению вращению ротора.
При чисто индуктивной нагрузке XL ток в обмотке статора отстаёт от ЭДС на 90 0 и поэтому достигает максимума в тот момент времени, когда полюс ротора повернётся на 90 0 по направлению вращения (рис. 4.7,б). В этом случае магнитный поток статора оказывается направленным навстречу магнитному потоку ротора и размагничивает машину ( ).
При емкостной нагрузке XC ток в фазе статора опережает ЭДС на 90 0 и поэтому достигает максимума в тот момент, когда полюс ротора не доходит на 90 0 до оси mm1 (рис. 4.7,в). Магнитный поток статора в этом случае оказывается направленным согласно с магнитным потоком ротора и намагничивает машину ( ).
При работе синхронной машины в режиме двигателя ток в статоре при том же направлении вращения имеет противоположное направление. Ось результирующего потока двигателя оказывается повернута относительно потока ротора на угол , но не против направления вращения, как у генератора, а по направлению вращения.
Таким образом, реакция якоря в синхронной машине изменяет как поток машины, так и его направление (в отличие от асинхронной машины, у которой ). Изменение Фрез приводит к изменению ЭДС, что неблагоприятно сказывается на работе потребителей электроэнергии при работе машины в режиме генератора.
Уменьшение неблагоприятного влияния реакции якоря достигается уменьшением магнитного потока статора за счёт увеличения воздушного зазора между ротором и статором синхронной машины.
6 Машины постоянного тока
Цель лекции: Ознакомление с устройством, принципом действия, режимами работы, характеристиками машины с различными системами возбуждения и видами коммутации машины постоянного тока.
6.1 Принцип действия генератора и двигателя постоянного тока
Электрические машины постоянного тока используются в качестве генераторов и двигателей, но наибольшее применение имеют двигатели постоянного тока. Двигатели постоянного тока используются для привода подъемных и транспортных средств, т. к. обладают хорошими пусковыми и регулировочными свойствами, а также возможностью получения частоты вращения более 3000 об/мин. Недостатками являются высокая стоимость, сложность в изготовлении и пониженная надежность, которые обусловлены наличием в них щеточно-коллекторного узла.
Характерным признаком коллекторных машин является наличие у них коллектора – механического преобразователя переменного тока в постоянный и наоборот. Необходимость в преобразователе связана тем, что в обмотке якоря коллекторной машины должен протекать переменный ток, т. к. только в этом случае в машине происходит процесс электромеханического преобразования энергии. Коллектор состоит из соединенных с витками обмотки якоря изолированных между собой пластин, которые, вращаясь вместе с обмоткой якоря, поочередно соприкасаются с неподвижными щетками, соединенными с внешней цепью. Одна из щеток является положительной, а другая – отрицательной.
В генераторе за счет коллектора и щеток переменный ток обмотки якоря преобразуется в пульсирующий ток во внешней цепи, то есть ток неизменный по направлению. Таким образом, под щеткой А всегда находится пластина коллектора, которая соединена с проводником, находящимся под северным полюсом, а под щеткой В – пластина, соединенная с проводником, расположенным под южным полюсом. Благодаря этому полярность щеток остается неизменной независимо от положения витка якоря. Пульсации тока ослабляются с увеличением числа витков и пластин коллектора.
В соответствии с принципом обратимости электрических машин упрощенную модель машины постоянного тока можно рассмотреть в качестве двигателя. Для этого необходимо отключить нагрузку генератора подвести к щеткам машины напряжение от источника постоянного тока.
В результате взаимодействия тока с магнитным полем постоянного магнита появятся электромагнитные силы, которые создадут в якоре электромагнитный момент, вращающий якорь против часовой стрелки. После поворота якоря на 180 0 электромагнитные силы не изменят своего направления, так как одновременно с переходом каждого из проводников якоря из зоны одного магнитного полюса в зону другого, в проводниках меняется направление тока. Назначение коллектора и щеток в двигателе – изменять направление тока в проводниках обмотки якоря при переходе из зоны магнитного полюса одной полярности в зону другой полярности.
6.2 Устройство коллекторной машины постоянного тока
Отдельные узлы электрические машины постоянного тока, предназначенных для работы в различных отраслях могут иметь различную конструкцию, но общая конструкция одинакова (рисунок 6.1).
Неподвижная часть машины постоянного тока называется статором, а вращающаяся – якорем.
Статор – состоит из станины 8 и главных полюсов 6. Станина служит для крепления полюсов и подшипниковых щитов и является частью магнитопровода, так как через нее замыкается магнитный поток машины. Станину изготавливают из стали – материала, обладающего механической прочностью и большой магнитной проницаемостью. По окружности станины расположены отверстия для крепления сердечников главных полюсов 6. Главные полюса предназначены для создания в машине магнитного поля возбуждения и состоят из сердечников 6 и полюсных катушек 7. Со стороны, обращенной к якорю, сердечник имеет полюсный наконечник, который обеспечивает необходимое распределение магнитной индукции в зазоре машины. Сердечники полюсов выполняют шихтованными из пластин листовой электротехнической стали толщиной 1-2 мм, которые не изолируют, т. к. окисная пленка на их поверхности достаточна для ослабления вихревых токов.
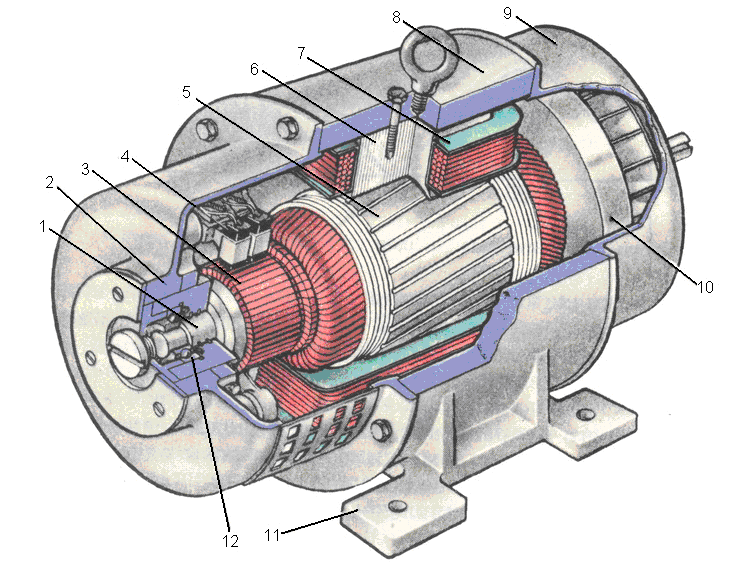
Рисунок 6.1 – Устройство машины постоянного тока
В машинах малой мощности полюсные катушки делают бескаркасными, то есть наматывают медный обмоточный провод непосредственно через изоляционную прокладку на сердечник полюса. В большинстве машин полюсную катушку делают каркасной, т. е. обмоточный провод наматывают на каркас (обычно пластмассовый), а затем надевают на сердечник.
Якорь состоит из вала 1, сердечника 5 с обмоткой и коллектора 3.
Сердечник якоря имеет шихтованную конструкцию и набирается из пластин электротехнической стали. Листы покрываются изоляционным лаком, собирают в пакет и запекают. Готовый сердечник напрессовывают на вал якоря. Такая конструкция якоря позволяет ослабить вихревые токи, которые возникают в якоре в результате его перемагничивания в процессе вращения в магнитном поле. На поверхности сердечника якоря имеются продольные пазы, в которые укладывается якорная обмотка. Якорную обмотку выполняют медным проводом круглого или прямоугольного сечения. Пазы якоря после заполнения их проводами обмотки обычно закрывают клиньями (текстолитовыми или гетинаксовыми). В некоторых машинах пазы не закрывают, а накладывают на поверхность якоря бандаж из проволоки или стеклоленты.
Коллектор является сложным узлом машины постоянного тока. Основными элементами коллектора являются пластины трапецеидального сечения из твердотянутой меди. Эти пластины собирают так, что коллектор приобретает цилиндрическую форму. Различают два основных типа коллекторов: со стальными конусными шайбами и на пластмассе.
Нижняя часть коллекторных пластин имеет форму «ласточкин хвост». После сборки коллектора эта часть («ласточкин хвост») оказывается зажатыми между стальными шайбами, которые изолируются от коллекторных пластин миканитовыми манжетами (прокладками). Коллекторы на пластмассе применяют в машинах малой мощности, где набор медных и миканитовых пластин удерживается пластмассой, которая и образует корпус коллектора.
В процессе работы машины рабочая поверхность коллектора постепенно истирается щетками. Чтобы при этом миканитовые прокладки не выступали над рабочей поверхностью, между коллекторными пластинами фрезеруют пазы на глубину до 1,5 мм. К выступающей части коллекторных пластин в паз закладываются проводники обмотки якоря и припаиваются.
Электрический контакт с коллектором осуществляется щетками, которые располагаются в щеткодержателе. Щетка снабжается гибким тросиком для включения ее в электрическую цепь машины. Все щеткодержатели одной полярности соединены между собой сборными шинами, которые подключаются к выводам машины. Одно из главных условий бесперебойной работы машины постоянного тока – плотный и надежный контакт между щеткой и коллектором. Давление на щетку должно быть отрегулировано, т. к. сильный нажим может вызвать преждевременный износ щетки и перегрев коллектора, а недостаточный нажим – искрение на коллекторе.
Кроме этих основных частей машина имеет два подшипниковых щита: передний 2 задний 9. В передней щите имеется смотровое окно с крышкой, через которое можно осмотреть коллектор и щетки не разбирая машины. Концы обмоток выведены на зажимы коробки выводов. Вентилятор 10 служит для самовентиляции машины: воздух поступает в машину обычно со стороны коллектора, омывает нагретые части (коллектор, обмотки и сердечники) и выбрасывается с противоположной стороны через решетку.