2. Основные характеристики дпт
Электромеханические свойства ДПТ определяются его скоростной характеристикой n(Iя), представляющей зависимость частоты вращения n от тока якоря Iя при U = const и Iв = const.
Уравнение естественной скоростной характеристики получают из выражения (3.3), решив его относительно частоты вращения
(3.4)
С ростом нагрузки омическое падение напряжения RяIя в цепи якоря возрастает, но при этом магнитный поток Фв уменьшается вследствие реакции якоря, под которой понимают воздействие магнитного потока якоря Фя на магнитный поток Фв, создаваемый током возбуждения. Так как падение напряжения в цепи якоря RяIя обычно оказывает более сильное влияние на частоту вращения якоря n, чем реакция якоря, то скоростная характеристика n = (Iя) имеет вид прямой падающей линии (см. рис. 20.5).
Важнейшей характеристикой ДПТ является механическая характеристика n(M), представляющая зависимость частоты вращения якоря от развиваемого ДПТ момента при условии постоянства напряжения и сопротивлений в цепи якоря и в цепи возбуждения. Заменив ток Iя в (3.4) значением из выражения вращающего момента М = СMФвIя, получим уравнение естественной механической характеристики
(3.5)
Естественная механическая характеристика n = (M) двигателя постоянного тока параллельного возбуждения выведена при условии, что момент холостого хода М0 = 0, а электромагнитный момент примерно равен моменту на валу двигателя, т. е. Мэм М, где n0 — частота вращения якоря двигателя на холостом ходу при допущении, что омическое падение напряжения RяIя в якоре отсутствует; n — уменьшение частоты вращения якоря двигателя при соответствующем увеличении момента вращения М; СE, СМ — конструктивные коэффициенты электродвигателя.

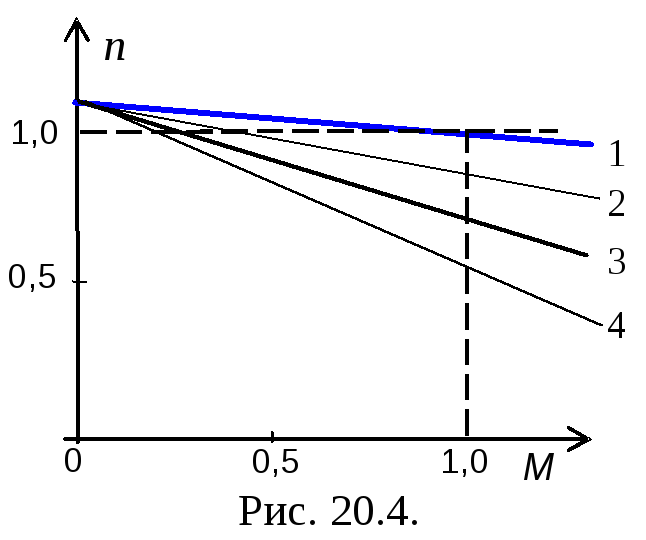
Если принять магнитный поток машины постоянным, т. е. Фв = const при токе возбуждения Iвн = const, то естественная механическая характеристика представляет собой прямую линию (см. кривую 1 на рис. 20.4), наклон которой по отношению к оси абсцисс определяется отношением
При переходе двигателя от режима холостого хода к номинальной нагрузке частота вращения якоря n снижается всего лишь на 2…8 %, т. е. двигатель постоянного тока параллельного возбуждения обладает жесткой скоростной характеристикой.
При введение пускового реостата в цепь якоря уменьшается жесткость механической характеристики (см. реостатные механические характеристики 2…4 на рис. 20.4), что приводит к снижению частоты вращения при определенном моменте сопротивления Мс на валу, создаваемом, например, определенным током электромагнитного тормоза ЭМТ (см. рис. 20.3).
Практическое значение имеют рабочие характеристики ДПТ.
Зависимость М = (Iя) называется моментной характеристикой двигателя. При установившемся режиме работы двигателя электромагнитный момент вращения М связан с током Iя якоря уравнением
Мэм = СМIяФв = М0 + М.
Момент холостого хода М0 мало изменяется при нагрузке; он определяется мощностью Р0, потребляемой двигателем из сети в режиме холостого хода. Так как отношение М0/Мн 3…8%, то, пренебрегая моментом М0, можно принять Мэм М = СМIяФв. При этом условии построение характеристики М = (Iя) начинают из начала координат (рис. 20.5). С увеличением тока Iя в якорной обмотке магнитный поток Фв уменьшается за счет размагничивающего действия реакции якоря, а потому моментная характеристика растет медленнее, чем ток Iя, отклоняясь от прямой (пунктирной) линии (см. рис. 3.3).
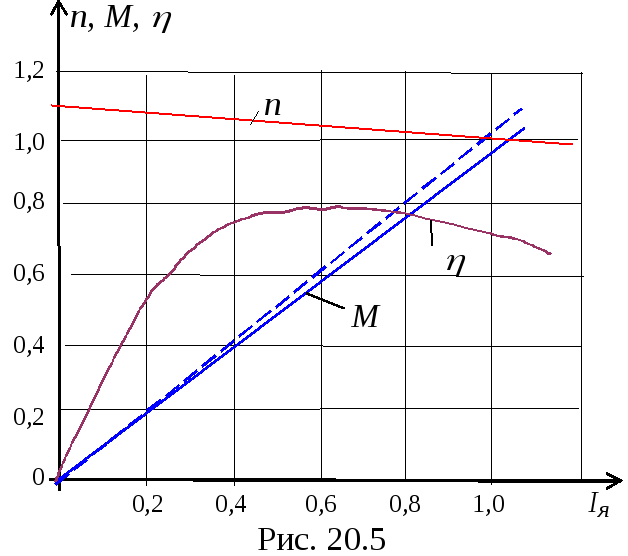
Характеристика коэффициента полезного действия = (Iя) нарастает очень быстро при росте нагрузки от нуля (режим холостого хода) до 0,5Iян и достигает наибольшего значения в пределах от 0,5 до 0,8 номинальной нагрузки, а затем медленно падает вследствие роста переменных потерь (см. рис. 20.5).
Электромеханические свойства двигателей постоянного тока

Двигатели постоянного тока с плавным регулированием частоты вращения находят применение в приводах различных машин, станков и установок. Наряду с широким пределом регулирования частоты вращения они дают возможность получать механические характеристики различной (требуемой) жесткости.
Из курса электротехники известно, что уравнение механической характеристики [ n =f(M) ] можно записать в виде

где коэффициенты Се и См зависят от конструктивных данных двигателя; U — напряжение сети; Ф — магнитный поток двигателя; R — сопротивление цепи якоря.
Формула показывает, что если U, R и Ф постоянны, механическая характеристика двигателя параллельного возбуждения представляет прямую линию (рис.). Если в цепи якоря нет сопротивлений, то механическая характеристика естественная (прямая 1, рис.а). Точка А соответствует номинальной частоте вращения n н, а n o называют частотой идеального холостого хода. Жесткость характеристики определяется сопротивлением двигателя R’, куда входит сопротивление обмотки якоря, дополнительных полюсов, компенсационной обмотки, щеток. Влияние сопротивления в цепи якоря на характеристику иллюстрируется прямыми 2 и 3 (см. рис.а).
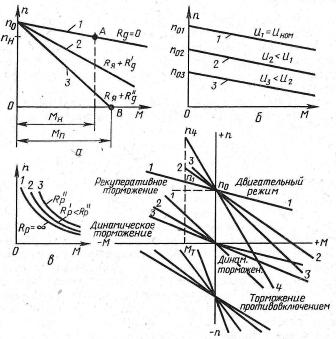
Рис. 1. Механические характеристики двигателей постоянного тока: а — при изменении сопротивления в цепи ротора, б — при изменении напряжения в цепи якоря двигателя постоянного тока с независимым возбуждением, в — при регулировании частоты вращения шунтированием обмотки возбуждения двигателя с последовательным возбуждением, г — при различных режимах торможения.
Формула позволяет оценить влияние напряжения U и потока Ф. При изменении U механическая характеристика двигателя с независимым возбуждением смещается параллельно естественной (рис.б); частота вращения холостого хода при постоянных R и U изменяется обратно пропорционально потоку.
Из формулы при n = 0 имеем

т. е. пусковой момент пропорционален потоку.
Таким образом, частота вращения двигателя может регулироваться изменением магнитного потока, напряжения, подводимого к обмотке якоря, введением сопротивлений в цепь якоря.
Регулирование частоты вращения двигателя изменением Ф применяют довольно часто, так как регулирование происходит плавно, без больших потерь энергии, поддается автоматизации. Диапазон регулирования в сторону увеличения частоты вращения не превышает 1:4, его можно расширить введением небольшой стабилизирующей обмотки последовательного возбуждения наряду с обмоткой дополнительных полюсов.
Регулирование частоты вращения изменением напряжения, подаваемого в цепь якоря двигателя, широко используют у двигателя независимого возбуждения (рис.б). В настоящее время выпускают двигатели с диапазоном регулирования до 1:8, диапазон увеличивается при применении тиристорных преобразователей.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
Ранее на эту тему: Электропривод
Механические характеристики электродвигателей и производственных механизмов

Механические характеристики любых механизмов играют важную роль во время конструирования электропривода, ведь любая деталь влияет на его работу.
Механическая характеристика – это зависимость нескольких факторов между собой. В случае характеристики механизма, то это пропорция угловой скорости на момент сопротивления механизма.
Существует порядка четырёх видов характеристик механизмов:
- Х-ка с моментом сопротивления (который никак не связан с темпом). Пример: подъемные краны, лебедки и прочее.
- Х-ка с моментом сопротивления, который связан со скоростью (линейная зависимость). Пример: генератор постоянного тока.
- Х-ка с нелинейным ростом момента сопротивления. Пример: вентилятор, гребной винт.
- Х-ка со спадающим сопротивлением (нелинейно). Пример: токарный станок.
Характеристика электродвижка — отношение угловой скорости к вращающему моменту. Для того чтобы оценить свойства характеристик существует их жёсткость.
Мягкая характеристика — темп сильно меняется при слабом изменении загрузки. Примером может быть двигатель с постоянным типом напряжения.
Жесткая характеристика — темп меняется при меняющейся загрузке. Пример: движок постоянного тока (синхронное возбуждение).
Абсолютно жесткая характеристика — константный темп оборотов движка во время меняющейся загрузки мотора. Пример: синхронный двигатель.
Естественная механическая характеристика — когда двигатель работает в условиях исходных параметров. Двигатель каждого вида имеет только одну такую характеристику. В отличие от других, которые имеют бесконечное число.
Двигатель постоянного тока независимого возбуждения (ДПТ НВ)
Двигатель постоянного тока независимого возбуждения (ДПТ НВ) В этом двигателе (рисунок 1) обмотка возбуждения подключена к отдельному источнику питания. В цепь обмотки возбуждения включен регулировочный реостат rрег, а в цепь якоря — добавочный (пусковой) реостат Rп. Характерная особенность ДПТ НВ — его ток возбуждения Iв не зависит от тока якоря Iя так как питание обмотки возбуждения независимое.
Схема двигателя постоянного тока независимого возбуждения (ДПТ НВ)

Механическая характеристика двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид

где: n0 — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n0 (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа =∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой (график 1).

Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными рисунок 13.13, а (график 1 Rдоб = 0 ).
Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением Rдоб), то механические характеристики называют искусственными .
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления Rдоб, называют также реостатными (графики 2 и 3).
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдоб для получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:

где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n0 — частота вращения холостого хода, об/мин.
Частота вращения холостого хода n0 представляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную nном на столько, на сколько номинальное напряжение Uном подводимое к цепи якоря, превышает ЭДС якоря Ея ном при номинальной нагрузки двигателя.


На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя n0 и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n0, a Δn остается неизменным [см. (13.10)]. В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U, подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения.
Используемая литература: — Кацман М.М. Справочник по электрическим машинам